I originally built a burly a few years ago and upgraded it to primo when that came out. I have lived it and had no problems; however, I’ve gotten to the point where I want it to be a bit more accurate so I went to add dual end stops to my mini rambo. got everything all set up and found out one of my sockets is bad. three end stops isn’t enough so now I’m asking myself if I get another mini rambo or move over to the fluidnc.
my main sticking point is I have my tool chain all worked out and everything works flawlessly. fusion 360 to gcode to cncjs running on a raspberry pi 3. can I plug the fluidnc into my pi 3 and have it work the same? I know fluidnc has a webui but I can’t tell if is like cncjs at all.
first off, thanks for the response and for giving us all this great cnc among other things.
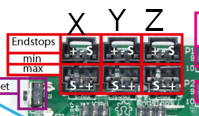
this is how i understand the rambo mini is set up:
the diagram makes me think that there are 6 possible end stops, 2 for each x, y, and z. in my case, M119 shows them all but x min doesn’t seem to work. when you say the board is not cut out for autosquaring, what do mean?
i don’t feel like my tool chain is complicated but maybe i’m just doing things the hard way. i need cncjs to jog the router around before i identify the origin, plus it gives me a nice visual of what i can expect the router to do. is that something i get for free on the jackpot?
To do auto squaring you have to have both steppers for each dual stepper axis be on its’ own independent driver. For MPCNC, that means you need a driver pair for X0/X1, Y0/Y1, and then one driver for Z. So a minimum of 5 stepper motor drivers so all the motors can be moved independently.
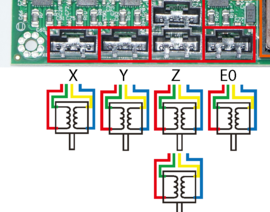
ah, ok, so the problem isn’t with the end stop connections but with the stepper motor connections here:
i had forgotten that both the x/y steppers are driven by 1 port instead of 2. i was focused on the end stop connections.
so this begs the question, what else do i need to migrate to the jackpot? i guess i could just wire things up the same but then i still can’t do autosquaring. i’d also need another set of wires to connect the second x/y motors independently, right? or if what i have is long enough, maybe i can just plug in the second motors. it’s late (early) on the east coast. i’ll have to take the wires out of my sheathing and see what is what.
also, will the power supply for my rambo mini be enough juice for the jackpot?
You’d need to have the non-series wiring, which really means get extension cables for any steppers that won’t reach the controller with their integrated cable.
Ryan sells a suitable extension cable in the V1 shop:
That depends on what power supply you are using.
Do you have specs, or a picture of the power supply label?
i’m using the power supply that came in the kit from the v1 shop at the time. it looks like a laptop power supply with a barrel connection. it says it puts out 12v dc and 6 amps. i see in a pic of the jackpot board that it’ll accept 9-24v but how many amps will it draw?
The current power supply Ryan sells is 24V 2.5A, so 60W. Your PS is 72W, so it would work with a Jackpot/MPCNC.
Edit- the benefit of 24V is in some scenarios you might be able to move steppers more rapidly, but an MPCNC isn’t going to move as fast as some other machines anyway; it has more inertia from it’s larger moving mass per unit volume.
I don’t see a need for you to change the PS on your existing machine.
so my last thing is the tool chain. i’ve been looking around on the forums a bit and it seems i can just use my exact same setup but connect my pi to the jackpot via usb and use that instead of wifi. then i just connect cncjs to the jackpot using the grbl option instead of marlin and i should be good to go.
oof. 5’ is gonna be about 1’ short. my mpcnc is a little more than 3’ square so with strain relief, the 5’ length isn’t gonna work. can 2 of this be plugged together for a 10’ cable? or are longer ones available elsewhere? an extra 5’ to make up for a 1’ shortfall is a bit much.
Just to comment on your first post of this thread, I use the Jackpot with CNC.js (on a windows machine) it seems to work well. Check out my other thread below where I raised some of my concerns with an upgrade to FluidNC to Rambo.
I saw CNC.js was updated to better handle FluidNC which has been helpful (no longer need to reset after connecting ect)
I’ll admit I owe the new UI a chance, but I am waiting for a more stable release of WEBUI v3 before giving it a try.