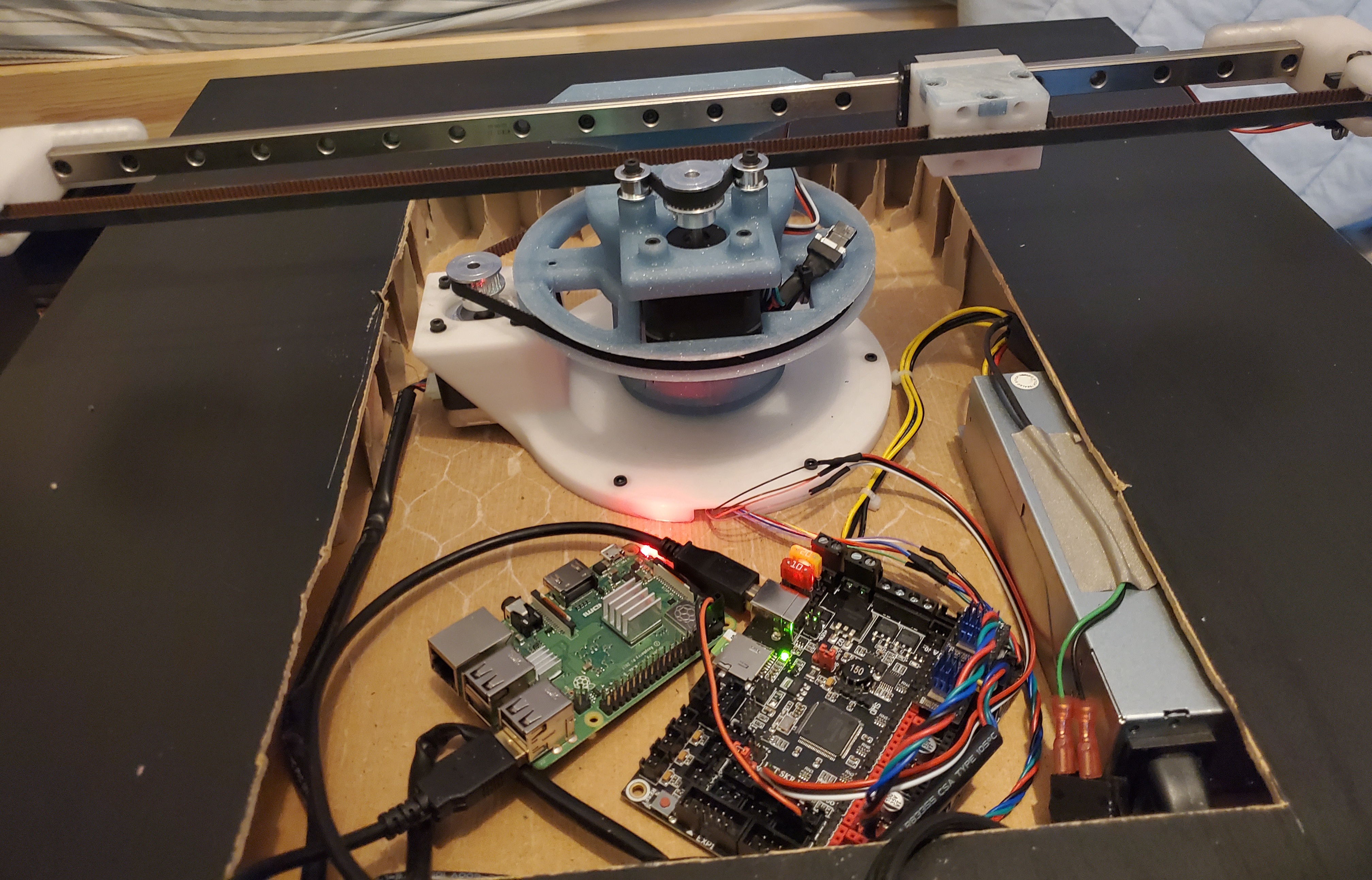
Recently got interested in building my own sand table and designed a basic polar setup using mostly 3d printed parts and a cheap amazon linear rail. It’s made to work with 2 Ikea lack table (inspired by quasithinking’s sandbot on thingiverse), but the design could be scaled up by mounting a larger rail. I have it running Klipper and successfully dry ran a few basic designs. However, the only way I’ve been able to get Klipper working is to configure the origin to be at the center of the workspace, requiring me to manually subtract the radius of the workspace from every X and Y coordinate in the gcode. Has anyone found a solution to this issue or would it be possible to get an option in Sandify to edit origin location for polar machines?
1 Like


In sandify, set the min to -250 and max to +250. Or whatever half the machine size is.
Or, you can set up some tricks in your homing gcode. Like:
G28 X Y
G0 X-250 Y-250
G92 X0 Y0
That will home, then move some distance away, and then tell klipper, “this is home now”.
1 Like
Oh, and what a nice looking machine! Looks great.
Does the linear motor spin with the machine? Do you have one of those fancy rings for connecting it?
I thought about a design like that, but with the second motor in the middle, but attached to the base, and it would have to also mix in the same steps from the angle motor.
Thanks! The linear motors spins with the top assembly, there is a 12.5mm slip ring in the middle to keep the wires happy. Planning on posting the files once all the bugs are worked out.
1 Like
So the slip ring has 4 connectors through? Didn’t know such a thing was made
The one I ended up using has 12 lines through. I doubled up for the stepper motor leads because the wires are pretty thin. There are a lot out there with 6 lines through but unfortunately with a stepper motor and endstop that’s one short.
1 Like
I did a little research after asking the question, should have started with that, but anyway glad you showed me what I had no idea was out there! I’m curious how it all holds up and if your steppers ever lose steps with the slip ring in the wire path.
1 Like

Got the table working and so far so good. It has some issues with moves at or very close to (0,0) but I’ll take it.
3 Likes
That is a pretty neat pattern. Very nice table.
Hello to everyone, I have a question for @Zawson if it possible to share the config file for the klipper? I’ll be probably using a different board, but I’ll modify the firmware for it. Honestly, I’d love to build it like you did, but I’m not sure if you configured the Klipper for the Polar or for the Cartesian.
1 Like