I recently learned that some “chalk” is just plaster of paris, i.e. gypsum, with some dye in it.
So if it helps, you should be able to make custom shapes pretty easily. If you are gentle with it, you could make chalk that is 10 mm in diameter and 300 mm long.
Or you could get fancy with a rack and pinion with the rack cast directly into the chalk.
A quick search of thingiverse & printables showed these 3 designs might be a good starting point for the spray can trigger. This certainly does simplify using chalk with this machine.
I was thinking the same thing, but it does mean you need a “slicer” to generate the E movement. Sandify and Estlcam might need a postprocessing step to add the extrusion and retraction. Not hard as a simple python program, but it has to exist.
I don’t know about using a liquid as that seems like it would be messier to clean up than the dry chalk or the spray paint chalk.
All this conversation did jog a memory of seeing rock climbers on TV use chalk powder for climbing. This could be similar to using sand but would dissipate with rain. I would wonder if this stuff would clump up any and not flow well. There are bunch of different brands on Amazon. Here is one of them. Amazon.com : Bison Designs Competition Chalk : Climbing Chalk : Sports & Outdoors
Sand is probably the least expensive way to go. I did learn something about chalk yesterday. Rock climber chalk is made from magnesium carbonate and sidewalk chalk is made from calcium carbonate.
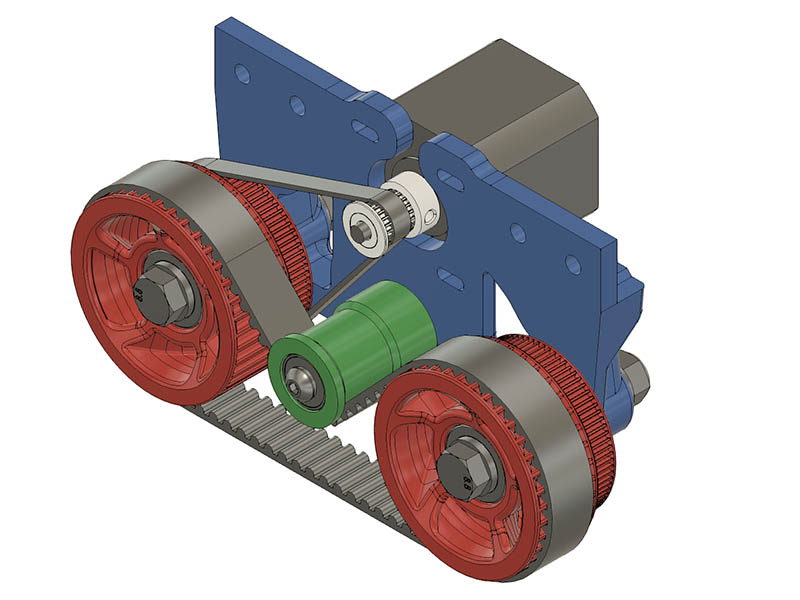
I am playing with redesigning the wheel plate today. I was thinking having the idler pulley lower would cause less bend in the plate. I did had change to smaller bearings to get it to fit, 625 2RS bearings instead of 608-2RS. That also changes the bolt from M8 to M5 which might also give more flex. That was the only thing I could foresee being a problem until looking at the assembly. The other style pulley has the belt connecting all on the inside whereas this one the outside of the belt will hit the pulley. Obviously, I knew that when drawing it up, but was thinking that any small debris the belts pick up will connect on that pulley. Might not be an issue. I will do a test print of this new pulley & see if it flexes any more that the other design before reprinting this wheel plate. This changes the drive belt to a 240mm length which I have a couple of. The HTD5 belt is the same length.
I can personally attest that this brand is consistently very fine in size and should flow pretty well. As long as it doesn’t get wet, it doesn’t get clumpy. (I go climbing and have used the chalk) Amazon.com
You can also dissolve this climbing chalk into 90% isopropyl (or ethyl) alcohol pretty well. Make it somewhat thicker for extrudable paste or really thin for a spray on version.
Scenic designers used to (don’t know if this is still state of the art) split the end of a long piece of bamboo in a couple of places, slip in a big chunk of chalk (like today’s sidwalk chalk) or charcoal, then hold it in place with elastic/rubber bands wrapped around the bamboo. This allows sketching out big backdrops while standing/walking around instead of having to crawl on the floor. A bundle of cloth on the other end of the bamboo served as an eraser/beater.
A quick Amazon search showed these sidewalk chalk holders that look to work along the same basic line. Don’t know if they could be adapted to allow moving the chalk forward as it is consumed.
I got the rolling plotter turned into an optional hotspot using the tutorial below. The V1pi had more stuff in it than I needed. This setup works well and had no hiccups except for typing WiFi password wrong in the config file. I was able to fix that easy enough by connecting to wired network. Raspberry Connect - Raspberry Pi - Auto WiFi Hotspot Switch - Direct Connection
Thanks for the info. Interesting approach. I still haven’t found something I can wrap my mind around yet. If I can get more accuracy out of this, I might test running my diode laser on it. I am reprinting the wheel plates today in clear PETG with 6 Perimeters & 70% infill and adaptive layers. They only take 3 hours each with the adaptive layer height of 0.2 to 0.28.
Maybe flip the “chalk chuck” idea upside down. Let the chalk “float” (or free-fall) during drawing moves, with a mild spring or bungee or something providing a little down force to maintain contact with the ground, but grab the chalk from the sides (with the “chuck”) when lifting up for travel moves.
I have an idea of how to get the chalk idea to work. Use a different way to connect the servo to the chalk holder. Have the servo where the 1st 30-45 degrees when put in down position will connect the chalk to surface but having down position of servo set to 90 or 180. That way the servo is constantly pushing down, but the servo should not be too strong to break the chalk. Servo might get a little hot though.
I put my new design together last night & tried it this morning but seems to be not as accurate as previous design. There are several things that are different than previous design. The idler uses smaller bearings and an M5x50mm screw instead of the M8x45mm bolts. The motor drive belt is 20mm longer, 240mm versus previous 220mm length. The idler is also in a different position below the motor turning against the back of the belt. The belt is tighter than before. Seems like the smaller bearings & M5 screws are mostly to blame.
I am thinking of trying another approach similar to design 2 years ago but using HTD5 belt for drive & tire tread. I will have to make a 3d printed HTD5 drive pulley. Seems like I might not need an idler pulley since the teeth are bigger & I will have 4.3 teeth engaged with a 20T Pulley. The advantage of this will keep the tire tread teeth closer to the wheel plate which will give less flex to the wheels. It also puts the motor about 59mm above center line of wheels. Any thoughts on this? I am starting to draw it up to see what it looks like. Are there any sources for buying HTD5 drive pulleys for nema 17 motors? It would have to accommodate 15mm wide belt.
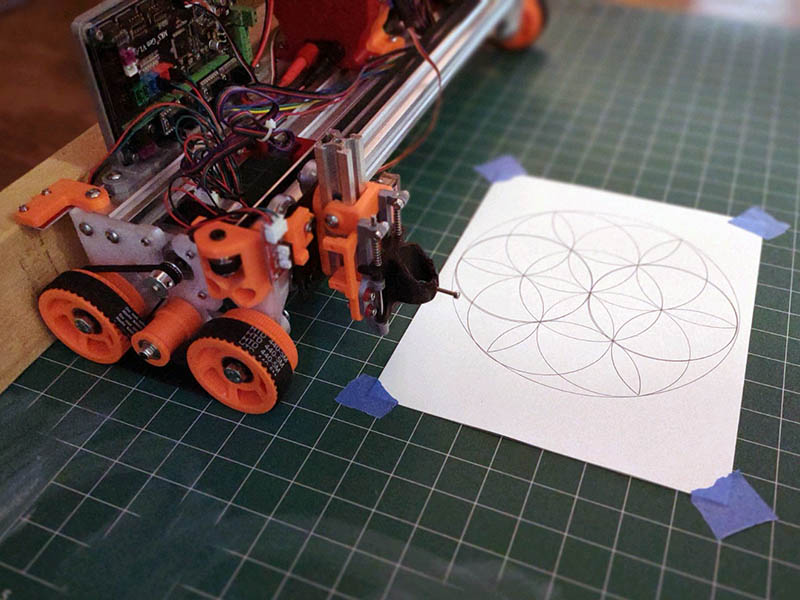
Here is a photo of the plates from yesterday assembled & test plot beside it.
How much of the chalk can you use up that way before the servo runs out and gets to it’s 90° or 180°?
I might try something like take a small DC motor and put a soft wheel on it If you get a geared down motor that has a very low RPM you might even still be able to lift it before it comes back into contact with the ground.
Chalk is kind of funny stuff, it does grip, but it can also slide on things. If you have a wheel constantly pushing downwards on it, but slowly the wheel can slide on the chalk when it’s in contact with the ground, but then it can move when the chalk wears.
If you want to get fancy, you could use a small stepper motor and configure it as an extruder, though that means a big pain with sandify gcode. I would try to set it up so that the wheel slips on the chalk rather than the stepper skipping steps.
With the small DC motor, you could get fancy and have it run off of something like a laser pin, so that it only runs while drawing.