Hi everyone!
I wanted to share my progress on my build and provide feedback where possible.
Hi everyone!
I wanted to share my progress on my build and provide feedback where possible.
The build documentation was solid and easy to follow overall. The PCB process was a bit fiddly as some components weren’t standard Chinese PCB factory parts, but PCBWay did a great job cross-referencing everything. A few items like the sensor voltage converters and some connectors needed to be soldered manually.
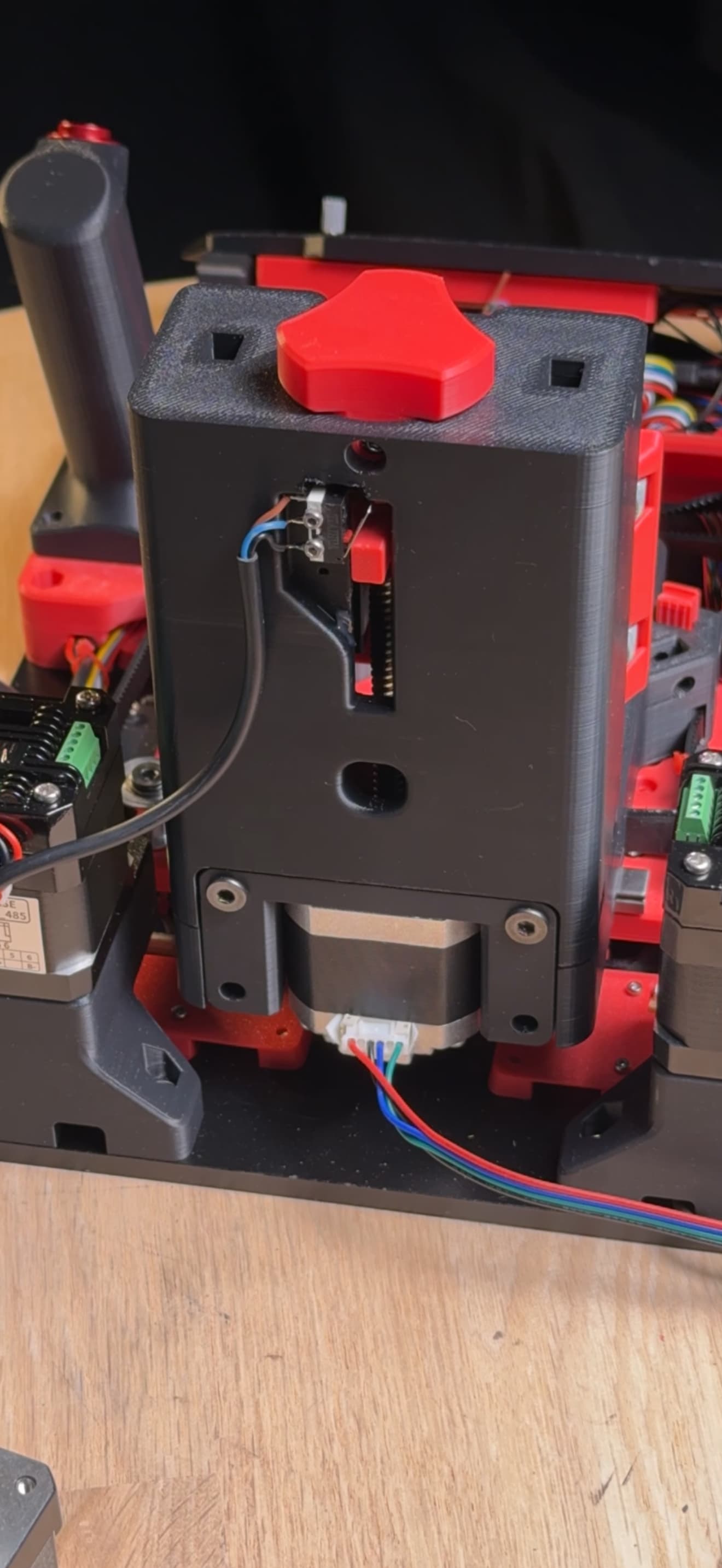
I made some design changes to keep all axes on linear rails. During assembly I covered a couple of access holes on other sections and the limit switch mount ended up too short, which I’ll fix and share in the next update.
I used steel wire core belts for the CoreXY system as that’s what I had on hand at the time. They were much harder to install than rubber belts due to their thickness and stiffness, but after trimming the belt ends they fit well. The system now feels very rigid.
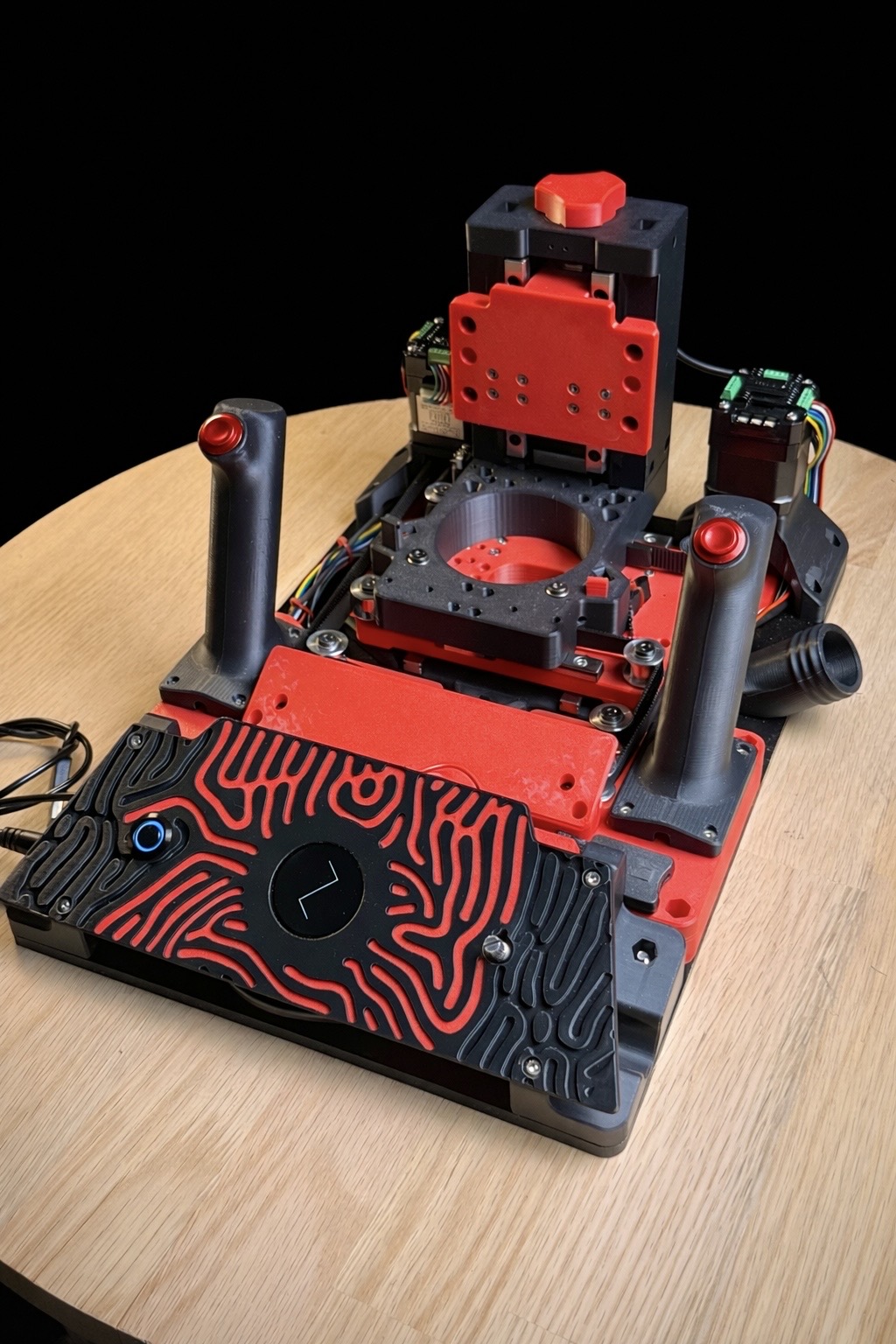
The red and black colour scheme, inspired by a redback spider, has come together nicely. For motors, I tested closed-loop NEMA 17s on X and Y to prevent step loss. One fixed-lead NEMA 17 at 1.5A wasn’t strong enough, so I’m upgrading to a 2A motor. Running one onboard tmc2209 driver alongside two closed loop drivers has worked without issues so far.
Firmware-wise, I hit a couple of compile errors from missing colour definitions and a preset selection bug that caused looping. Both are now fixed and everything is running well.
Moving into testing next. More updates soon.
@camchaney i came across this variation of the coreXY setup if useful? May reduce having to cross belts and simplify setup, however longer belt might mean more play.
@camchaney i had a thought if possible to have a settings or config menu on the screen to setup motor settings, reverse motors etc. This menu could be trigged if the encoder button pressed down when turned on? This will allow user to test and change settings before homing process.
That looks exciting too.
But reading this now, you’ve changed quite a lot, haven’t you?
There are certainly some new parts to print.
All the deflections are different now, aren’t they?
What do you expect from the modified Z-axis?
Would that be purely mechanical?
Do you have a few more pictures of that?
Does it feel more stable than before?
what is this mechanical monster? is this like a DIY shaper?
Shaper as in shaper origin?
Yes.
You are new in this town, are you? ![]()
What gave me away…?
The hat. ![]()
Thems fightin words ![]()
@Myles very cool build, i love your channel and content and it’s nice to see you build one of these.
I’m unsure if you’ve read up on what has happened to this project but basically it got killed by greed and a very unbalanced and unfair legal system (patent law). Are you gonna continue with the build? There seems to be some people interested in trying to advance it.
You’re not infringing on a patent by building something so long as you’re not selling or trying to patent it yourself as far as i understand it.