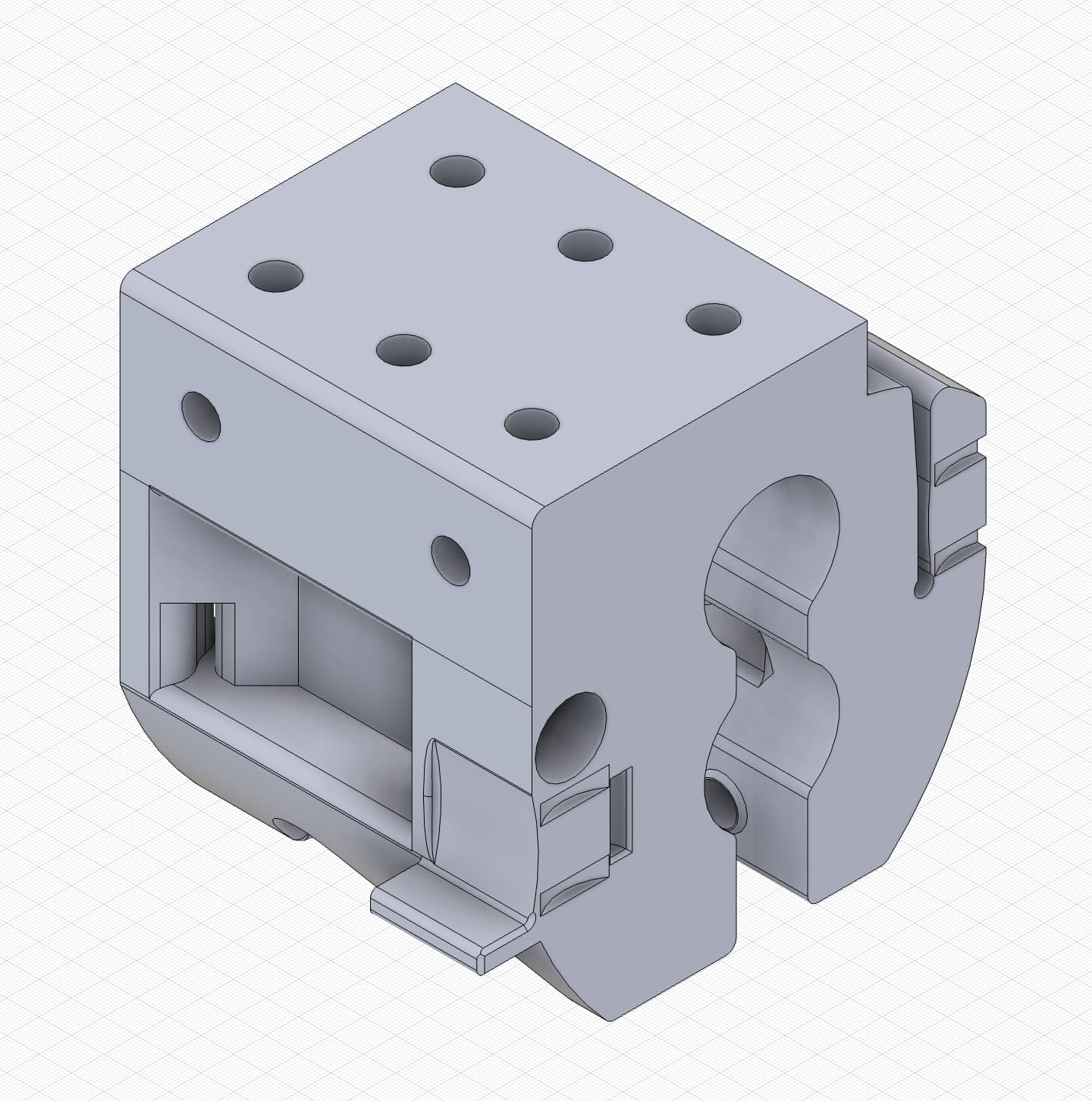
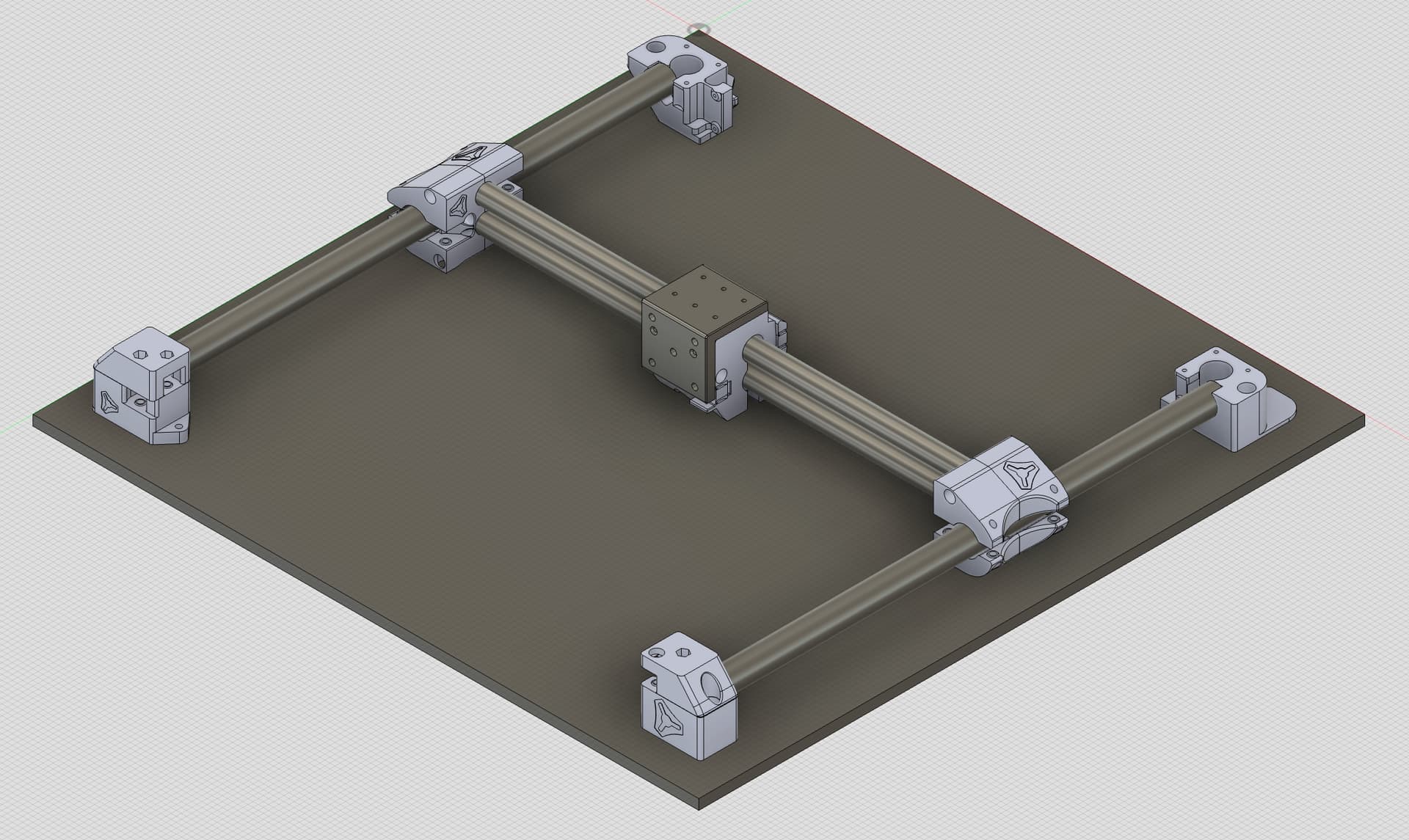
I’m planning to use the ZenXY as the basis for a DIY laser engraver. I’ve pulled all of the STEP files into Fusion 360 and have everything setup as a complete assembly of all parts, plus I added the conduit for the X and Y axes. In doing this I notice that the conduit tube in both power blocks extends slightly above the surface where the stepper motor mounts.
Is this normal? It looks like the stepper will try to crush the conduit…
The stepper motor basically adds a little clamping force to the long rails is what I experienced from building it. Keeps things nice and stable.
The 3D printed nature of the plastic parts mean some tolerance differences happen as well. In general the mechanism works well.
Were you planning to have the laser beam centered where the magnet is? A neat trick if you can manage to get the focal length of your laser to work for it. Of course if a bit of waste area is acceptable, you could put the laser on the side of the core.
I considered the idea, but because I wanted to be able to enable a rotary axis, I decided on a cartesian approach for my new laser build. The CoreXY build that I did before will be repurposed as a drag knife vinyl cutter.
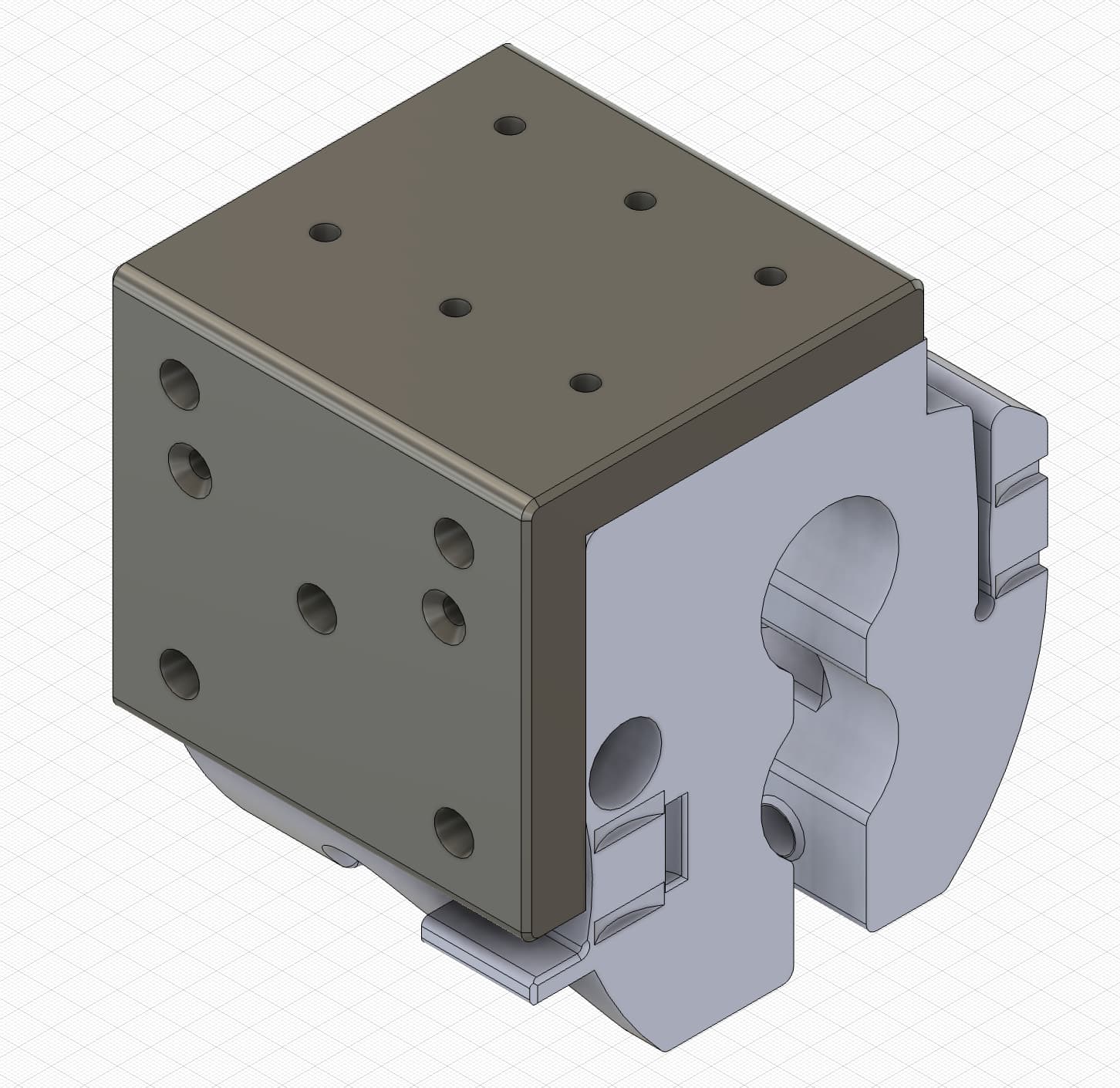
I modified the STEP file for the Zen Center to create a mounting corner for a bracket to which the laser module will be mounted. The ZenXY will be inverted and mounted on top of a table. The “work surface” that’s in the drawing is a placeholder.
Thanks. It’s basically an inverted ZenXY that I hope to use for a laser engraver/cutter. I just assembled all of the STEP files provided by Ryan into an assembled machine. So far the only changes I’ve made are to the Zen Center component, to allow mounting a laser module.
There isn’t if you do the rotary axis as an A axis, but I don’t have CAM that does that (or maybe I don’t know how to use it), so I want it to substitute for a Y axis. (Or maybe X…) that means that I need to redefine my motors.
With the Duet, it’s easy enough to simply redefine the Y axis to another motor driver. With the Jackpot, I would just enable another configuration yaml file, so… same.
Hmmm… thinking about it, if I switched from CoreXY kinematics to Cartesian, put the X drive on drives 0 and 1 then both motors would turn the same direction for X moves, which…moves X, and leaves Y steady… Can’t do it on the Bart Dring pen/laser board, because it needs a third driver, but could work on a Jackpot.
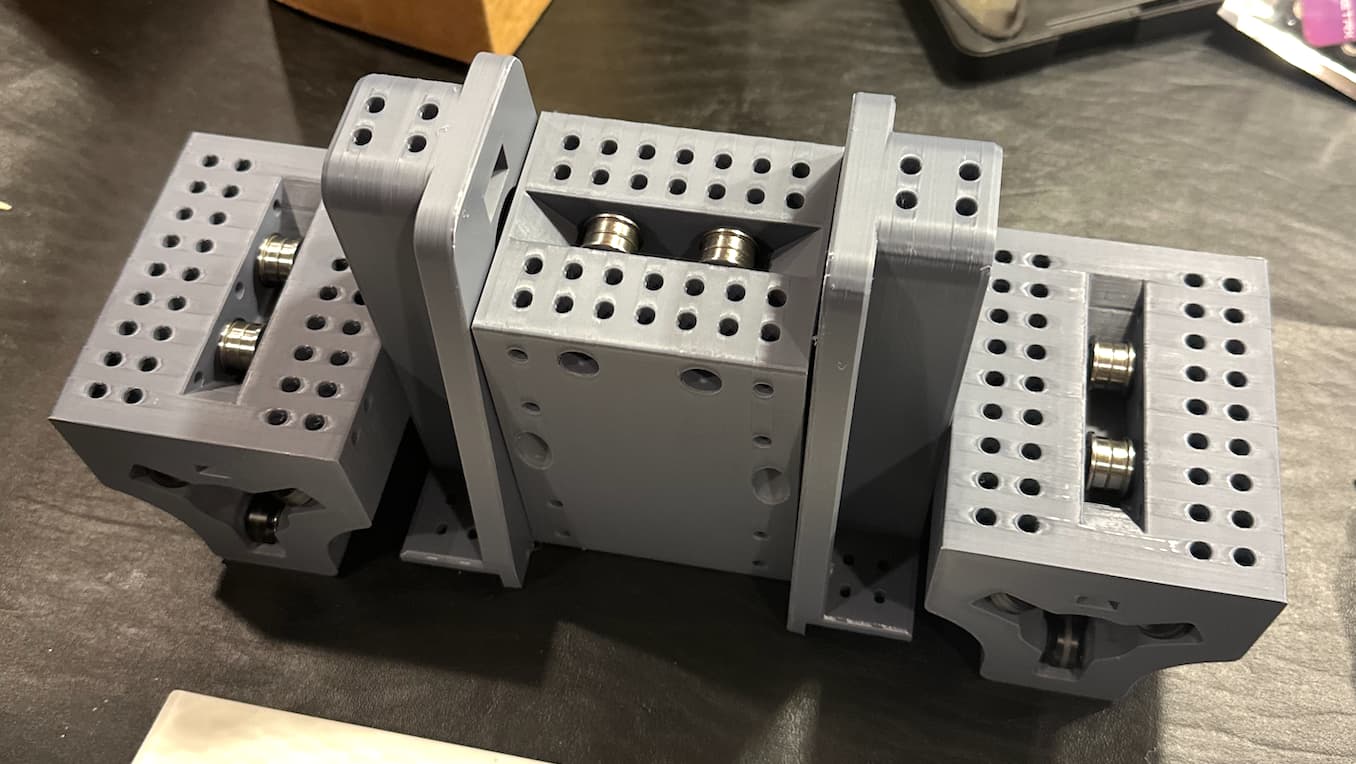
Not sure if this is an appropriate post here, but since my design is MPCNC-inspired…
First pic, left to right, shows a Y-carriage, X rod carrier, X-carriage, X rod carrier and Y-carriage.
Second pic is the same, but with the X rod carriers “in place”.
Third pic is the X carriage assembly. I’m using 3/4" Sch40 aluminum pipe. It’s not as cheap as conduit, but at $2.50 a foot I spent just $30 for 4 3-foot pipes.