I’m new to 3d printer boards, but I’m really willing to learn. I have build robots before with arduino and rpi, familiar with programming etc…
My MPCNC is currently printing. Meanwhile parts are trickling in. I received 3 boards:
Creality v1.1.4 (Ender 5) my friend was kind enough to give it to me for free.
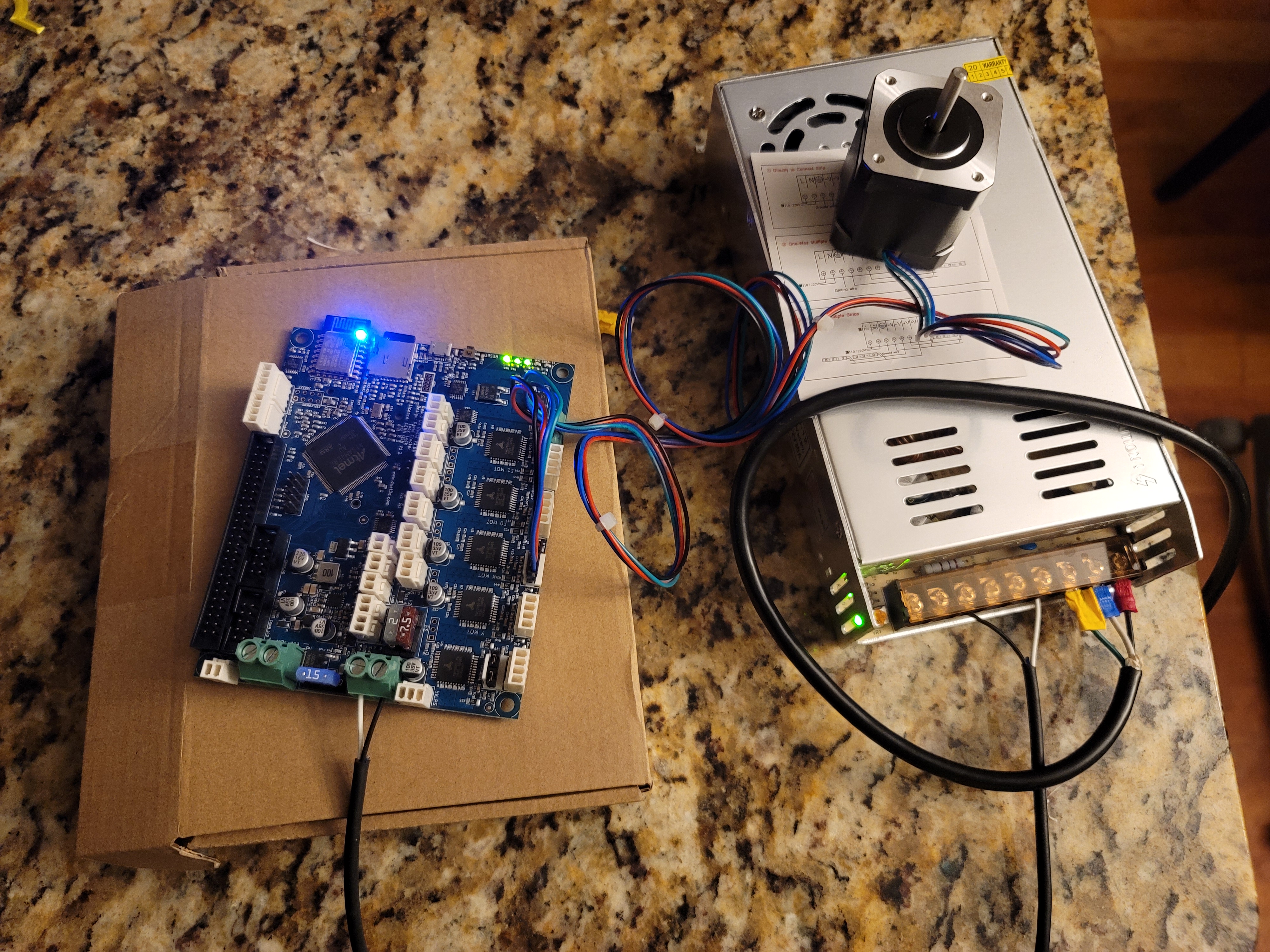
BTT GTR v1.0 32 bit (new from Amazon) with 2208 drivers.
Duet 2 WiFi (clone from Amazon)
I also got
Nema 17 84oz.in
Power supply 12 Volts, 30A
All I want to do is to use each board to just spin the motor. This would ensure that boards are good. Can someone please tell me where to start looking or what would be a high level process to achieve this?
As long as all 3 are flashed with firmware. You should be able to hook up power, stepper drivers, &motors. Then connect to the pc and command each access to move.
Not really a way to check, if your not sure I would just flash it with new firmware from v1, you’ll need that firmware if you want to use it with the mpcnc anyway. For the gtr and creality boards that would be marlin and you should use platformio to flash it. To communicate you can use any number of programs, I think the recommended one is Estlcam. I’m pretty sure the duet board is different but not sure what you need to do.
True, for the gtr I would start with the v1 skr pro release, for the crality I would start with the Rambo release, then change the board to the proper one.
I have the day off (actually this week off). I have downloaded the skr pro version and trying to figure out what to do next. I watched teaching tech tutorials and figuring out how to set it up.
I think those files in the assets on github are source code. What i need to do is to compile it and install it on the board. Is that correct?
Correct but you will probably need to change code to get it to work with gtr board(haven’t looked into the difference between it and the skr pro yet) and you will definitely need to change it for it to work on the creality board.
I see. Since i just want to spin the motor, do i need to do major changes? I can change it to more precise settings later on when i installing on MPCNC. But to begin with to just test the board to spin motors it should be small change. At least that’s what I’m hoping for.
This is asking for “Firmware version:” running on board. How would I find out that information? Also it appears that the configuration tool is made for 3d printers (terminilogy like heated bed etc dont apply to CNC right? Unless I am mistaken and they are repourposed for someother feature in CNC) how do i pick up those parameters.
In order for me to just spin the motor, shall i just pick up everything default (do net, next next, finish) and then install it?
That’s good to know. Do you know what firmware version was your board?
EDIT:
I found out that I can use YAT to connect to DUET board via COM Port. Send command M115 to get the firmware version. Mine is at version 2. I will install latest version 3 and then configure it.
M115
FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 2.0(RTOS) ELECTRONICS: Duet WiFi 1.02 or later FIRMWARE_DATE: 2018-06-05b3
ok
For the marlin boards, I would assume they have some firmware installed. Just plug in the motor, power the board, plug in USB and try connecting with repetier host or cncjs. There will be some hiccups because you won’t know the baud rate.
Once you get connected you can jog with the buttons and get some info by sending M115 or M503.
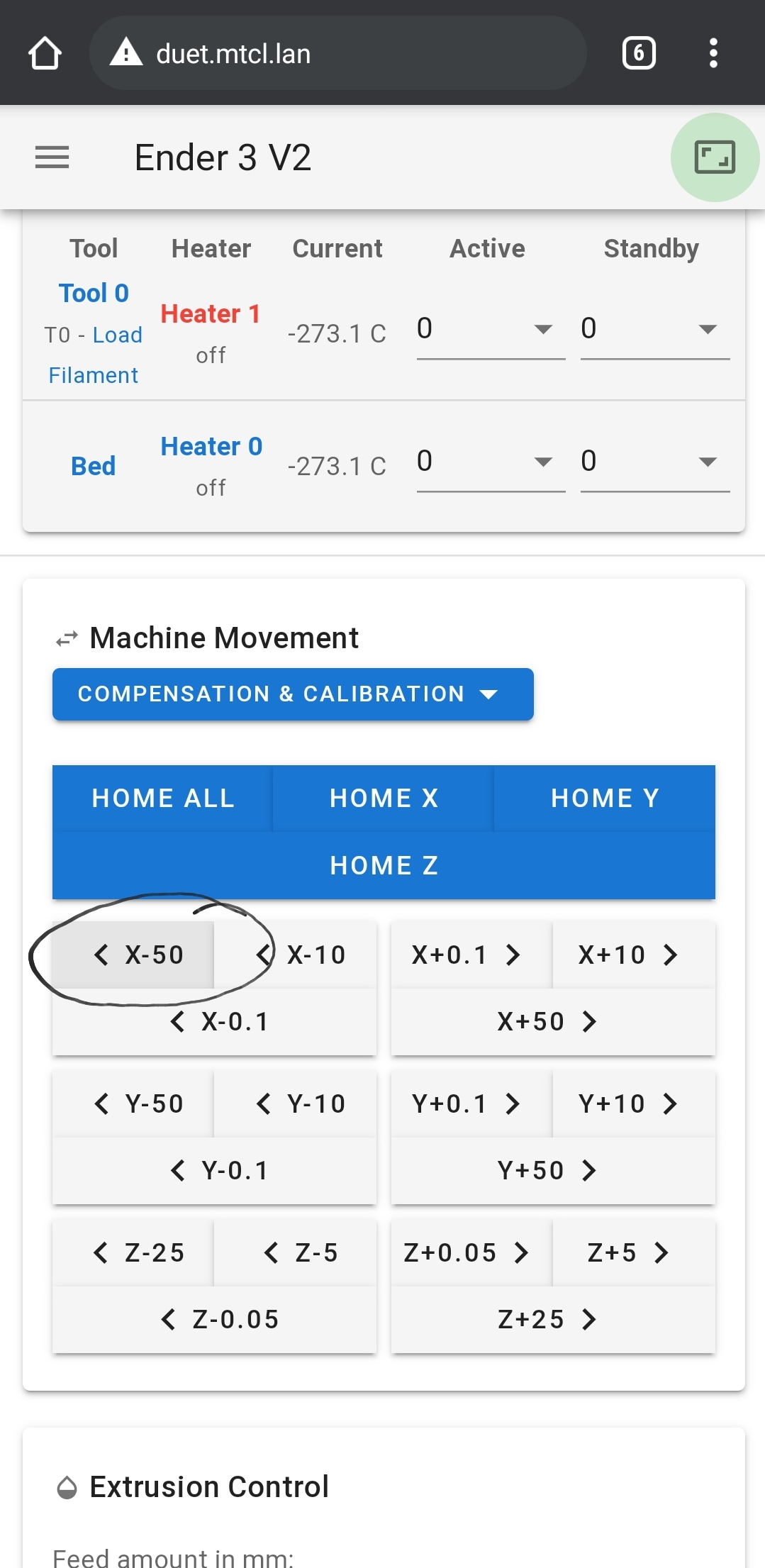
I erased the firmware, loaded latest 3.1.1 firmware and DWC on to sd card. From online configurator i picked up ender 3 Pro default settings. After connecting to web interface, i was able to get the motor moving.
My clone has all the same screen printing as my original. The only difference I have found is everything is not lined up as neatly. And my paneldue is a 7 not the 7i that I got from duet