Hey everyone,
This build log may be different from most, as I have already built “most” of my MPCNC, however I plan on doing things a little bit different than most and wanted to share my experience for other to follow along.
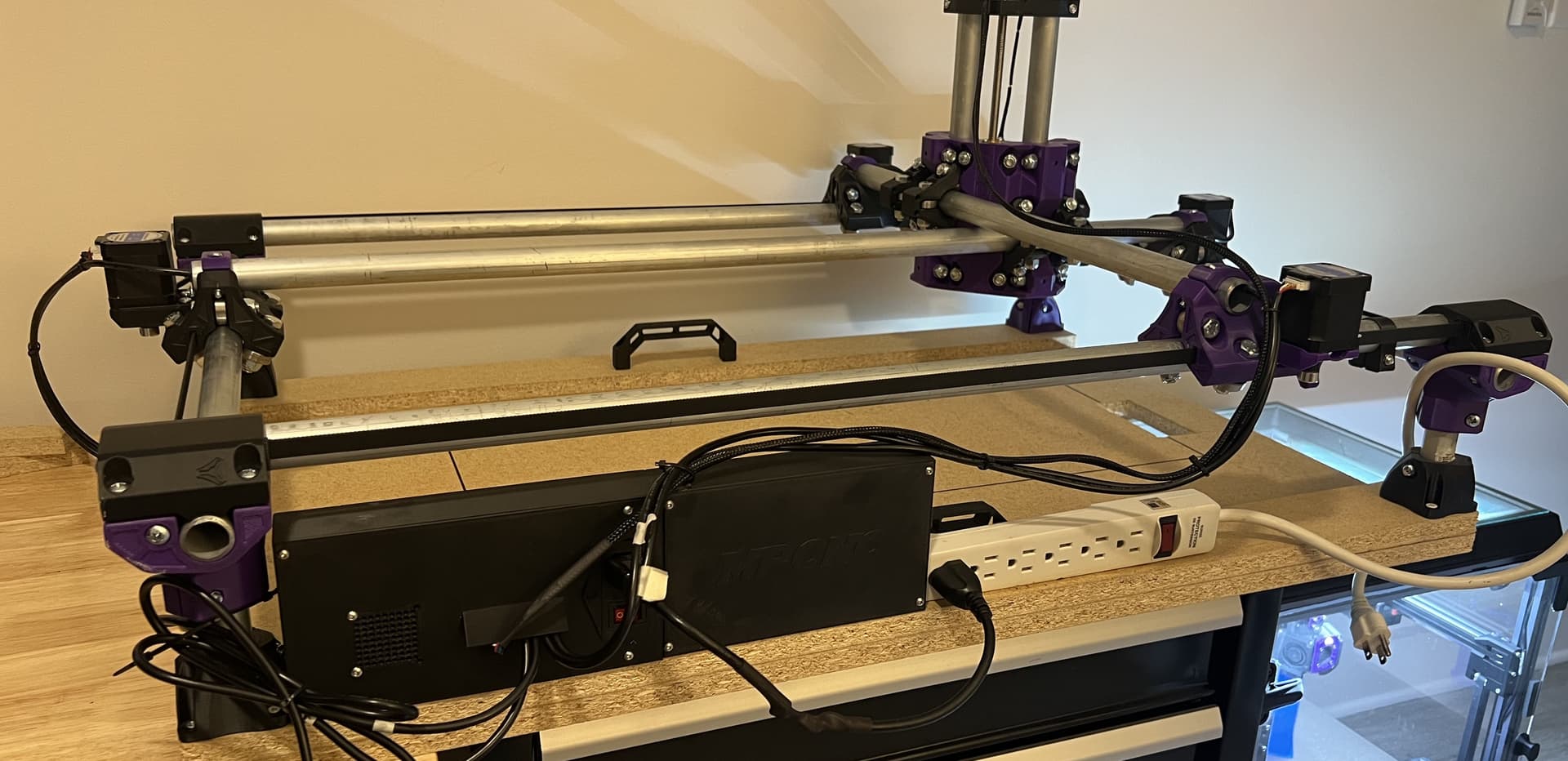
My main goal of this build was to keep cost as low as reasonable, and use as many parts I already had leftover from 3D printer builds/general maker items. This included the control board which is an SKR Mini E3 V2.0. I am running Klipper as the firmware, as I have quite a bit of experience with it, and really love how easy it is to configure/change.
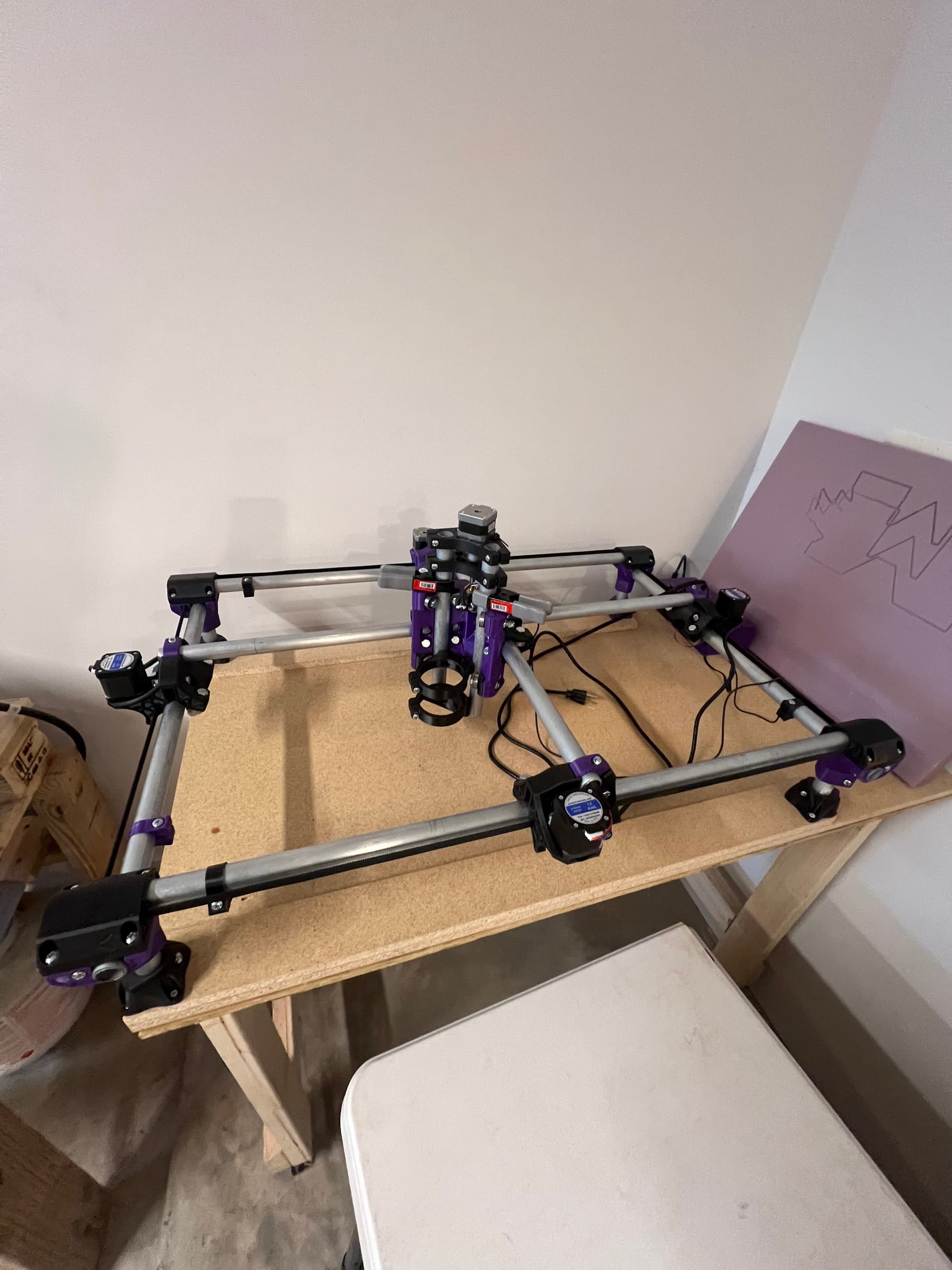
I chose approx. 25in x 13in for the work area because that makes the build table a perfect 36in x 24in. I used a 2x4ft sheet of particle board as the base, which leaves 1ft left for control board/power supply storage/tools.

For printed parts, I chose to use ABS rather than PLA, which I know may be against the standard practice from what I have seen. Given that I am in the Southern US, and this MPCNC will live in my garage, I didnt want to get any warping or melting in the hot summer. I printed everything on my custom Voron Trident, which prints ABS exceptionally well.
I have slowly been learning how to use Estlcam and I understand the basics thus far. I was able to successfully drawn “the crown” test (sorry didnt take a picture).
However, after that job I ran into an issue with the y axis. It starts to “bind up?” and only one side of it will move like 3mm and then get stuck, as the conduit is at a slight diagonal. I have tried adjusting all of
the bearings/nuts on each of those trucks, but the issue persists. I was wondering if anybody else had a similar issue. My only other guess is that it is related to the belt tension not being perfectly even
on both sides, not sure how vital/exact that needs to be. I am afraid I might have to take everything apart and rebuild, but very carefully go through and adjust each of the bearings to be perfect.
Anyways, I have a bunch of plans for upgrades, and will continue to post as they come along! I want to thank everyone here on the forum for being so nice and extremely helpful. If you have any tips, suggestions, or questions please feel free to ask away!