@Breslauklaus
Great work!
Ich habe meine 2208 nach ein paar mal probieren auch zum laufen bekommen.
Stell deine Frage doch mal auf deustch, dann kannst du dich vielleicht besser ausdrücken.
Why are we actually pushing the ball and not pulling it?
From a purely physical point of view, the effort required to pull is less?
It would definitely be hard, if not impossible, to always pull the ball. The best example is, “what would happen when the ball changes direction?”. The arm can’t flip sides without moving the ball.
So each pattern needs to have one direction for the elbow. Either on the “clockwise” or the “counter clockwise” side.
I have not thought about this before, but I think having the elbow on the side it is makes sense, because most sandify patterns accidentally rotate counter clockwise.
But watching that video, it is clear that the star is rotating clockwise. Which makes me wonder if we have a mistake and it is flipping the pattern. It may not matter much for a design centered in the middle, but if it was text, would it be flipped? If we fix that, we can fix the push/pull.
This are the equations to go from theta, radius to the two unscaled motors:
You can change this equation to reverse the angle (change float(theta) to -float(theta)). This could also be achieved in the electronics, be swapping the motors (plugging motor X into port Y) and reversing each motor (by reversing the stepper plug).
Ah jetzt verstehe ich es.
Du musst in der Config.h unter dieser Code Zeile von true auf false oder andersherum wechseln. Dann ändert sich die Richtung.
Wenn du also bei X/Y true stehen hast musst du dort false hinschreiben und dann den Code nochmal auf den Arduino laden.
Wenn du die neuen Stepper benutzt musst du diese Codezeile ändern.
Ich hatte andauernd Probleme mich mit dem Ramps1.4 zu verbinden.
Irgendwann habe ich gemerkt wenn ich die 12V Spannung nicht am Ramps anstehend habe funktioniert die Kommunikation immer. Da ich ja keine wirkliche Ahnung von Elektronik habe, wurden die 3.3V und die 2 x 5V Pins, zwischen Ramps und Arduino kurzerhand durchgetrennt.
Seit dieser Änderung gab es nie mehr Probleme mit der Kommunikation zwischen PI und dem Arduino Mega Clone.
Mein Raspberry Pi3 hatte aber auch permanent Unter-Spannungsprobleme, trotz eines 12V Stepdown mit angeblichen 3A. Zum Glück hatte ich noch einen HIFIBERRY AMP+ rumliegen, den ich inzwischen in das Projekt verbaut habe. Der Vorteil durch den AMP+ ist, man kann den Tisch jetzt mit einer 12V Batterie betreiben und ist von keiner Stromquelle abhängig, was ich sehr schön finde.
Sollte es noch eine Software geben welche den Tisch noch zum Musik spielen bringt welche mit dem Image von V1 oder später mit SandyPi kompatibel ist dann wäre das perfekt.
Einfach nur Lautsprecher einbauen und Musik auf den Tisch abspielen.
Ich befürchte mein Tisch wird nie fertig.
Es ist sehr schön wie in diesem Forum sehr sachlich und immer hilfsbereit umgegangen wird.
Kompliment an alle hier, ihr seit einfach Super.
Super das du mit deinem Projekt gut voran kommst und die Probleme lösen konntest.
Ob das mit der Musik möglich ist weiß ich leider nicht aber es gibt bestimmt Projekte mit einem Rasberry Pi ein Netzwerk zu erstellen über das dann Musik abgespielt werden kann.
Hast du auf deinem Tisch eigentlich schon Tests laufen lassen mit einer Kugel und Sand oder hast du bisher nur den Roboter fertig?
Irgendwann wird dein Tisch bestimmt fertig sein.
Danke auch für deine Hilfe in diesem Forum und bei meinen Fragen!
Momentan dreht bei meinem Projekt nur die Mechanik.
Die Sandscheibe wurde noch nicht Gelasert
da wir uns bei mir in einem Lockdown befinden und
alle Schulen geschlossen sind und nur im Fernunterricht arbeiten.
Wird noch 3 -4 Wochen dauern bis wieder alles anlaufen darf.
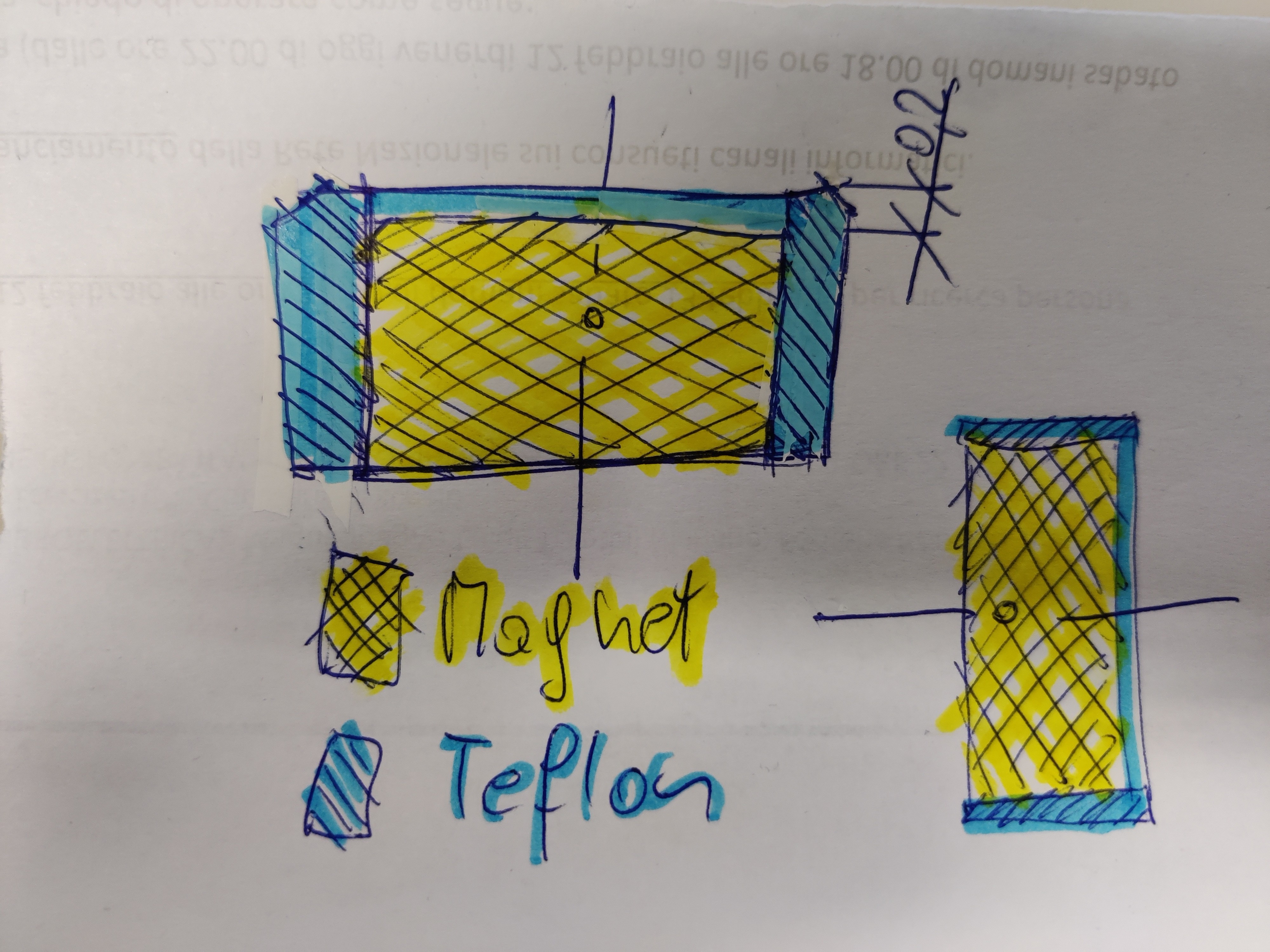
Bis dahin werde ich den Magneten in eine Hülle aus Teflon einpacken
um die Reibung an der Unterseite an der Sandscheibe zu verringern.
ich hab nur eine Drehbank und keine CNC momentan.
Delrin ist eigentlich nur ein Art leicht zu bearbeitendes Nylon
und hat für sich keine Eigenschaften welche die Reibung mindern.
Aber versuch macht klug.
Bei den Versuchen nach der Montage der Teile ,
habe ich herausgefundenn dass das Homing nicht mehr richtig funktioniert,
Der Magnet ist zu stark und beim Überschwenken über dem Lager und er Welle von der Y Achse hat die XAchse einfach mitgedreht.
Zuerst habe ich die Motorstrom Halte Zeit mit M84 auf 340 verlängert
als das klappte habe ich
in der Configuration _adv_h habe ich dann die Zeit von 30 sec. auf 340 verlängert.
Great design, and I saw your post just the time I gave up constructing the Scara mechanism with 3d printed parts (printer somehow not printing precisely)
Would it be possible for you to share your CAD files for the laser-cut aluminum parts of your mechanism?
Guten Tag
gerne gebe ich die CAD-Dateien frei, es ist halt zu bedenken dass noch keiner meinen Mechanismus nachgebaut hat und deswegen noch ein paar Eigenheiten vorhanden sein können. Für Verbesserungen an den Zeichnungen bin ich immer zu haben.
Mein Aufbau benötigt die Voraussetzung einer kleinen Werkstatt, mit Bohrmaschine, Gewindeschneider, Drehbank (oder das innere GT2 60 Zahnrad wird selber gedruckt), Messinstrumente (Schieblehre, Winkel, Meter usw.), Schraubstock zum Biegen der Arme, Schraubendreher, Imbusschlüssel usw …
Auser der Drehbbank vieleicht könnte alles vorhanden sein.
Das GT2-60 Zahnrad welches innen auf dem Arm geschraubt wird muss 100% zentrisch laufen, deswegen wird ein Teil des Lager ins Zahnrad eingelassen.
Mein Tisch hat einen Durchmesser von 80cm.
Der Sand Zeichnungs-Durchmesser beträgt +/- 64cm.
Sie benötigen zum bau meines Mechanismus Aluminium in 3 verschiedenen Stärken.
5mm
3mm
2mm
Des weiteren benötigen sie:
6 St. Kugellager Typ 608
ca. 30cm 8mm Welle
8St. M5 Silentblöcke
Schrauben M3 x 20
Schrauben M3 x15
Muttern M3
2 St. Riemenscheiben GT2 60
2 St. Riemenscheiben GT2 40
2 St. Riemenscheiben GT2 20
2 St. Spannrollen GT2
2 St. GT2 Riemen 170mm
2 St. GT2 Riemen 390mm
Beilag Scheiben M8 (als Distanzstücke)
Das sollte im wesentlichen alles sein.
servus
Klaus
I basically designed a mechanism based on Rob’s original design with some tweaks to make it a little modular in terms of stock belt diameters as well as printing diameter, however currently my 3d printer is in the middle of an upgrade.
I intend to use some critical features of your design and modify it a little to my use, manufacturing is not a problem at all.
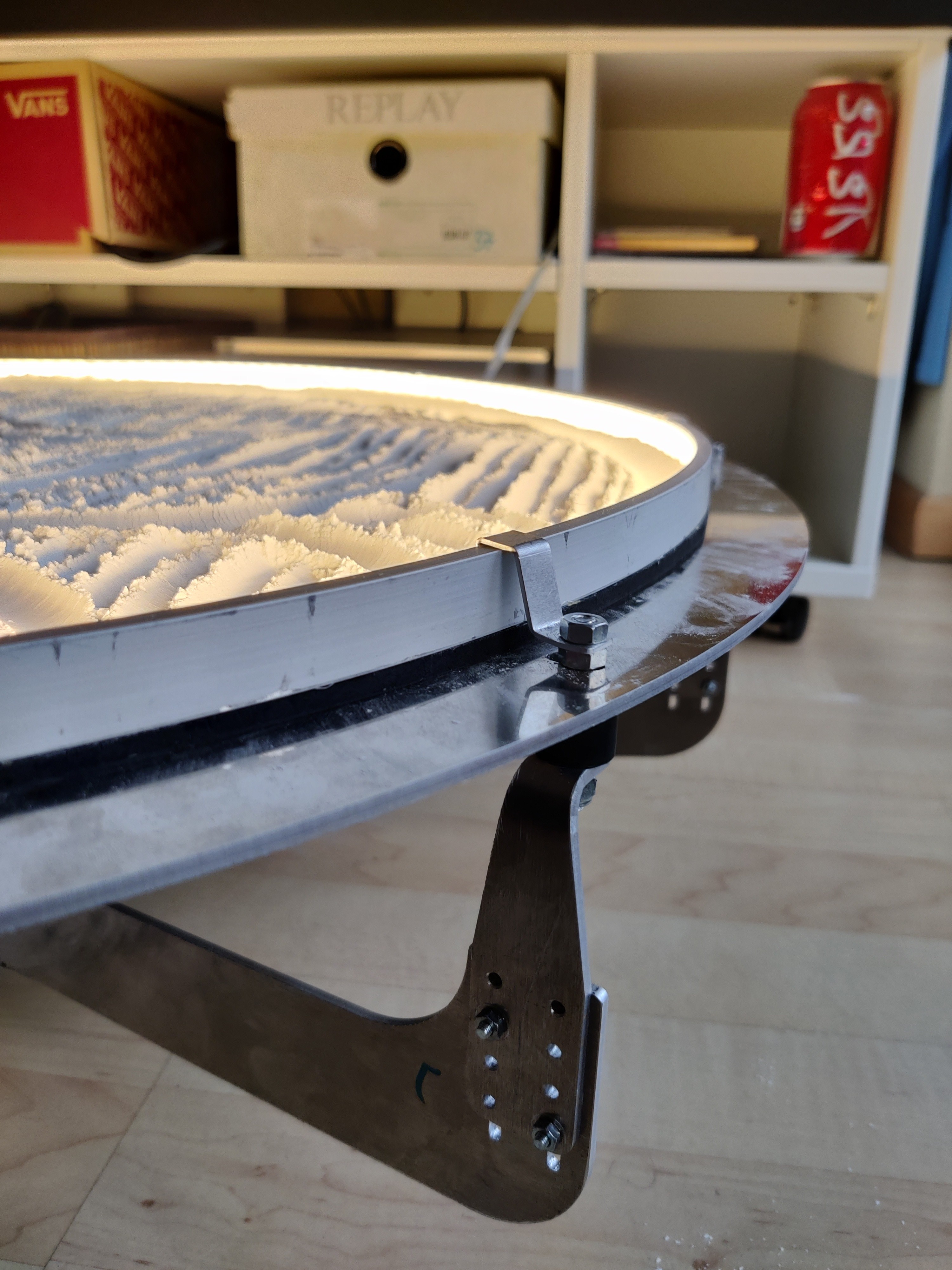
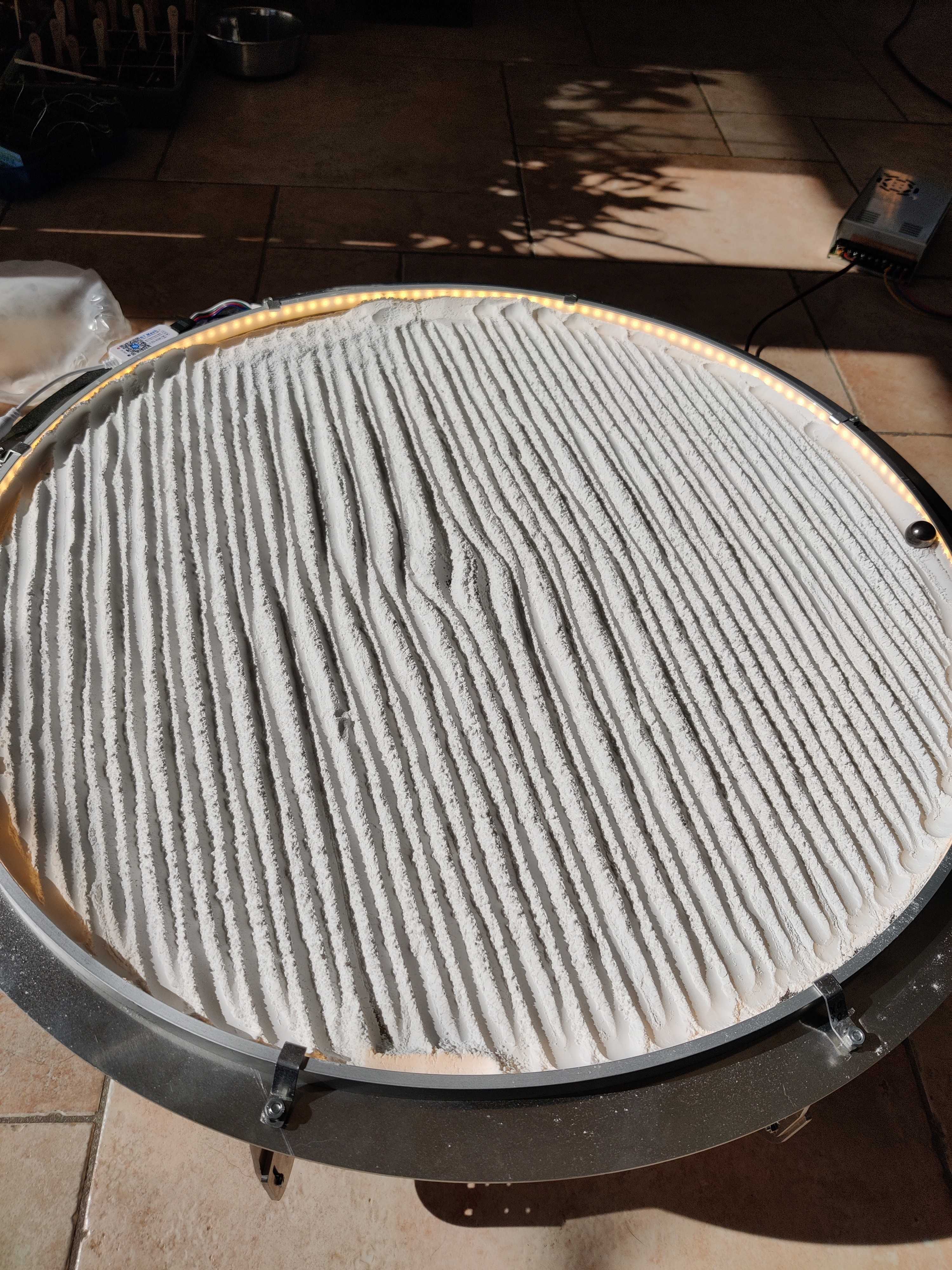
Die Sandträgerplatte ist inzwischen eingetroffen und montiert.
LED sind montiert und auf 5mm Moosgummi aufgeklebt.
Der Marmorsand ist fein wie Zement.
Hier ein Paar Einrücke.
That looks awesome! The fractal tree looks very nice. There are some patterns bobnik and I have published for circular tables (mostly bobnik) in a github:
es ist wieder mal Zeit über den aktuellen Stand zu schreiben. Inzwischen ist mir aufgefallen, dass die im Sand gemahlenen Zeichnungen etwas ungenau waren, oder besser gesagt der Arm bewegte sich in ca. 1cm Toleranz zur Kugel.
Somit wurden alle gemahlenen Bilder etwas verzerrt. Das Problem wurde gleich gefunden. Der montierte Magnet ist wahrscheinlich ein bisschen zu groß, was dann die Toleranzen ausmacht.
Also einen kleineren Magneten eingebaut, von 30mm runter auf 12mm.
Der von mir verwendete Marmorstaub als Sand wurde auch beim mehrfach überfahren sehr fest verdichtet was mir auch nicht ganz gefallen hat, zudem fehlte ihm das Typisch glitzern wie bei Kristallzucker, er war einfach Stumpf.
Also irgendeinen Sand mit einer gröberen Körnung auf die Platte. also ab in den Baumark um einen Kinderspielsand zu kaufen.
Schock jetzt weiß ich erst, was ihr mit Sand Geräusch gemeint habt, denn beim Marmor Staub war absolute Ruhe. Die Kugel rollte jetzt in unruhigen bahnen über den Tisch. Das unruhiger habe ich durch das dursieben in den Griff bekommen.
nächstes Problem der Magnet verliert andauernd die Kugel, ganz außen am Rand zum LED streifen. Erst nach längeren analysieren habe ich auch dieses Problem gefunden. Ein Berechnungsfehler in der Planung. Der Zeichendurchmesser vom Arm ist großer als der Durchmesser vom LED Streifen und fahrt ca. 1cm darunter hinein. Dieser Fehler wurde erst durch den kleineren Magneten sichtbar da der alte Magnet mit 3cm Durchmesser einfach immer ins Bild ragte. Also wurde ein Distanzstuck für den LED Streifen gezeichnet das den Durchmesser um ca.2 cm dehnt. Dieses Teil wurde in transparenten Nylon gedruckt.
Beim Einbau des LED Streifen habe ich eine dieses Mal eine Transparente Tischdecke aus PVC mit ca. 1mm untergelegt um das Sand- reibe Geräusch zu lindern. Es funktioniert und das Abrollgeräusch ist wesentlich stiller geworden.
Nur das mit dem Kugel verlieren ist noch nicht ganz ok, werde wohl demnächst einen 16mm Magneten einbauen denn der 12mm hat zu wenig Anziehungskraft.
Ansonsten bin ich mit dem Ergebnis sehr zufrieden.
der Sand wird jetzt mit einem Roten Saharasand aus Douz in Tunesien ausgetauscht. Den Sand hat mir ein Bekannter grade von einer Rallye mitgebracht.




 That looks awesome! The fractal tree looks very nice. There are some patterns bobnik and I have published for circular tables (mostly bobnik) in a github:
That looks awesome! The fractal tree looks very nice. There are some patterns bobnik and I have published for circular tables (mostly bobnik) in a github:


