No, I mean I have a manual plasma cutter but not CNC - a workable, inexpensive THC is a major barrier and your proma sure ain’t cheap!
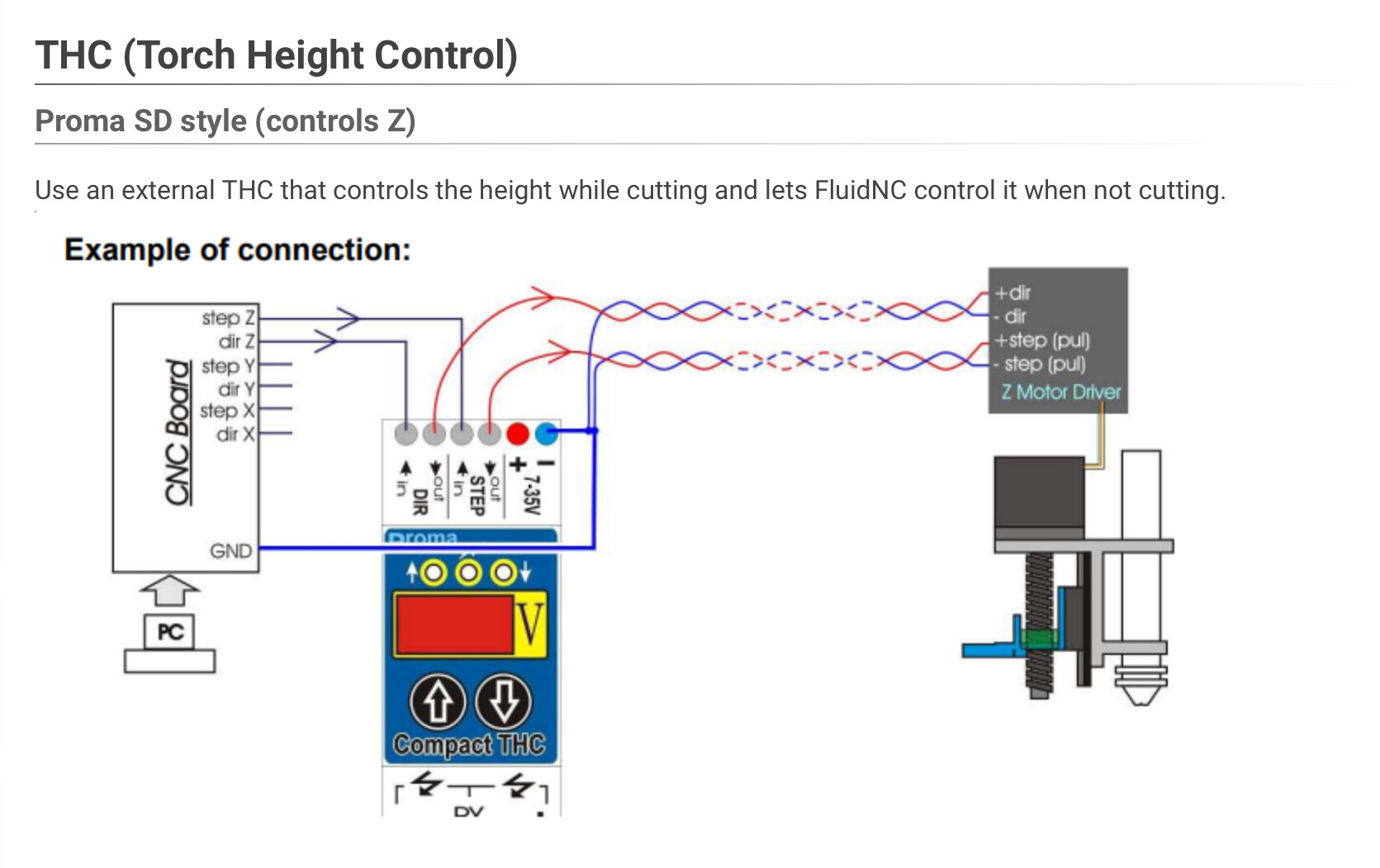
Is this (from the FluidNC wiki) suggesting that you can connect the THC in parallel with your stepper drivers?
No, I mean I have a manual plasma cutter but not CNC - a workable, inexpensive THC is a major barrier and your proma sure ain’t cheap!
Is this (from the FluidNC wiki) suggesting that you can connect the THC in parallel with your stepper drivers?
So I have the drivers set to 24v that I have 24v ran to it from my terminal blocks. For the thc the controller sends stp and dir signals to the thc and then the thc sent step dir signals to the drivers based on a set feed back voltage from the torch.
I did order a 6x fluidnc board and drivers as a back up but would love to figure this out with the jackpot
I don’t think this is referring to the power level, but the logic level. It may be powered with 24v but the step/dir pins are operating at 5v. If the Jackpot is 5v logic (I expect the 6x board is the same) but the THC controller is using 24v logic, that could be a problem.
I actually don’t have the thc hooked up right now just trying to make the z axis work properly first then I’ll cross that bridge
Looks fine
Product specifications:
- Model: Compact THC SD
- Supply voltage: 7-35V DC
- STEP/DIR inputs: TTL 5V
- Pass Frequency : 0 - 100kHz
- Step Correction Frequency: 0 – 5kHz
- Measurement range: 30-300V DC (1000 VDC)
- HV/HF Separator : Yes
- Built-in voltage divider: Yes 1:50
3.3v logic. If you’re using external drivers on Jackpot, they need to either be 3.3V io compatible (e.g. optoisolated inputs), or use level shifters if they are 5V only.
Also, big deal here: YOU NEED ESD Protection, especially on a plasma table, or you’re going to blow up ESP-32s on a regular basis.
Ah, I knew the ESP32 is 3.3v but didn’t realize the TMC2209 supported both 3.3 and 5v so it wouldn’t require a level shifter.
Yes every single wire has shield drains and optic isolators
Well started re wiring the box alittle today since I have the 6x board coming. I don’t have enough free time right now to try and figure the jackpot out so I went a path I know will work I appreciate the suggestions and effort you helped out with I’m gonna hold on to the jackpot for another project I think… hoping to have this wired and ready to go by the time the 6x gets here
Was sent the yaml today for external drivers on the jackpot. I might build a test board to try it out but the gentleman that sent it to me says it works.
Here is the yaml:
board: Jackpot external drivers
name: MPCNC
meta: 08-10-2023 RyanZ // NEWTech Creative
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#X
motor0:
limit_neg_pin: gpio.25:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 5.000
standard_stepper:
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
y:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 2440
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#Y
motor0:
limit_neg_pin: gpio.33:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 5.000
standard_stepper:
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
#B
motor1:
limit_neg_pin: gpio.34:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 5.000
standard_stepper:
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 1200.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 200.000
feed_mm_per_min: 300.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.32:low
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
standard_stepper:
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
c:
steps_per_mm: 80.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.39:low
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
standard_stepper:
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: NO_PIN
digital3_pin: NO_PIN
#Laser:
# pwm_hz: 5000
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# tool_num: 0
# speed_map: 0=0.000% 255=100.000%
# off_on_alarm: true
# pwm:
# pwm_hz: 5000
# direction_pin: gpio.26
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: false
# 5V out gpio.26/27
# VMot out gpoi.2/16
# In's left to right gpoi.25/33/32/35/34/39/36
Did this ended working for you?
There are more details on the V1 Facebook page. He switched to Bart’s 6x board.
He ended up ditching that as well. Went with a different 4 driver board that had THC built in. Cant remember the name off hand.
I dont need anything other than external drivers support