I’ve just converted from LR2 to LR3 using all the same stepper motors as before. I have upgraded to the Jackpot CNC controller. I have one Driver getting extremely hot at startup when motors are locked. I have not checked if it cools down when motors are freed. It gets too hot too quickly to find where to turn them off. I can smell it and it burned my finger.
Is it possible I just have a bad driver or the Pot got bumped?? Is there something else I can look at?
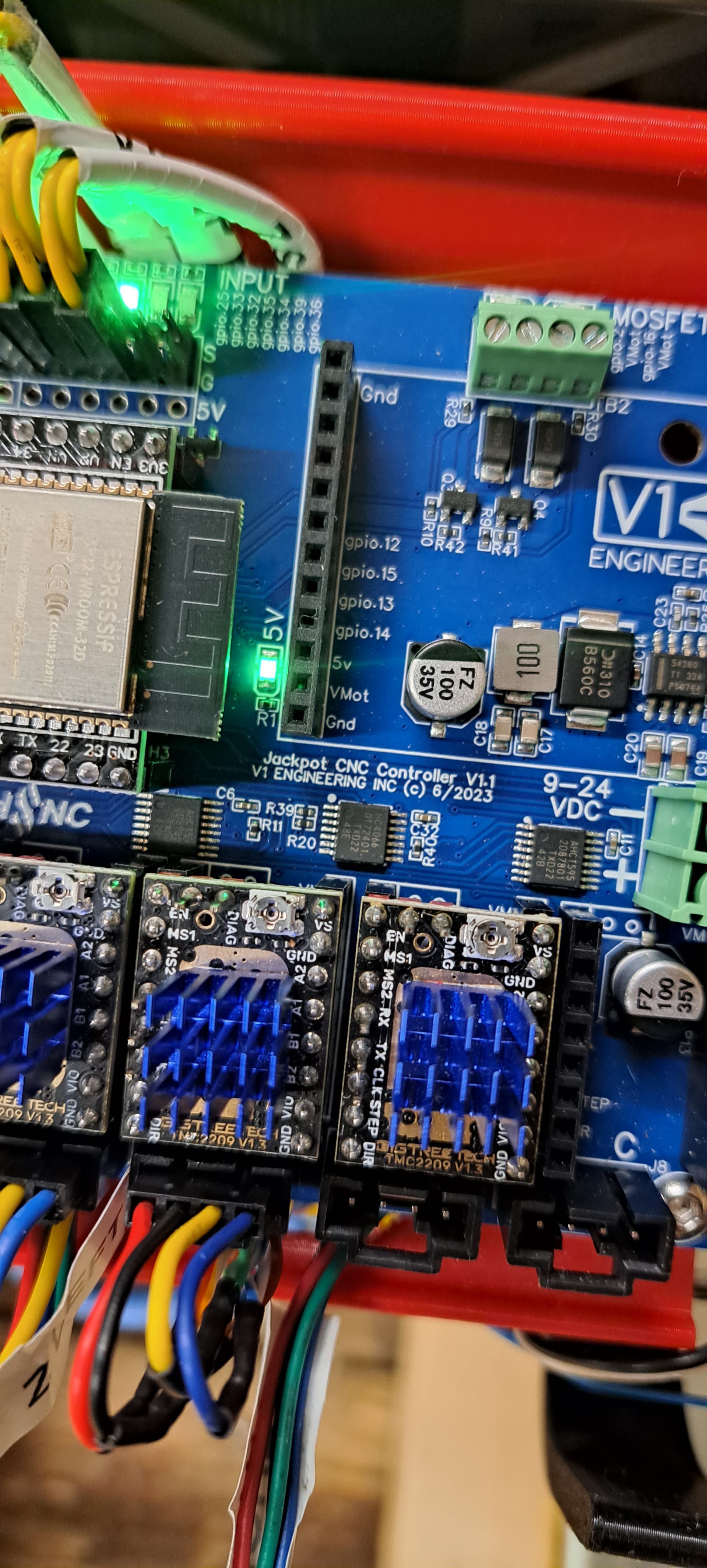
-Version 1.1 6/2023
-TMC 2209s that came with the jackpot board
-Driver stays cool with no motor plugged in.
-Plugged in another known working motor and the same overheating issue.
-Moving the driver to a different axis on the controller makes no difference.
-Haven’t touched the potentiometer on the driver or changed any amp settings.
We found at some point some of the boards boot wrong with the steppers plugged in. The new ones have a fix but if this is the cause we have options. Yours seems a little off previously they have all booted under powered (your pots might come into play here might be a backup boot system). To be safe you can turn all the pots down to make sure nothing melts.
Here is the logfile with motor NOT plugged in
(Not related but I noticed Low Memory warnings here. The controller had been running for about an hour with no motor plugged in vs just a few mins (bottom log file).
> $G
> [MSG:WARN: Low memory: 13328 bytes]
> [MSG:WARN: Low memory: 9836 bytes]
> <Idle|MPos:0.000,-50.000,0.000|FS:0,0|Pn:Y>
> <Idle|MPos:0.000,-50.000,0.000|FS:0,0|Pn:Y>
> <Idle|MPos:0.000,-50.000,0.000|FS:0,0|Pn:Y>
> $SS
> [MSG:INFO: FluidNC v3.7.8]
> [MSG:INFO: Compiled with ESP32 SDK:v4.4.4]
> [MSG:INFO: Local filesystem type is littlefs]
> [MSG:INFO: Configuration file:config.yaml]
> [MSG:INFO: Machine LowRider]
> [MSG:INFO: Board Jackpot TMC2209]
> [MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
> [MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21]
> [MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
> [MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
> [MSG:INFO: Stepping:I2S_static Pulse:4us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
> [MSG:INFO: User Digital Output:0 on Pin:gpio.26]
> [MSG:INFO: User Digital Output:1 on Pin:gpio.27]
> [MSG:INFO: Axis count 3]
> [MSG:INFO: Axis X (0.000,1220.000)]
> [MSG:INFO: Motor0]
> [MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
> [MSG:INFO: X Neg Limit gpio.25]
> [MSG:INFO: Axis Y (0.000,2440.000)]
> [MSG:INFO: Motor0]
> [MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
> [MSG:INFO: Y Neg Limit gpio.33]
> [MSG:INFO: Motor1]
> [MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
> [MSG:INFO: Y2 Neg Limit gpio.35]
> [MSG:INFO: Axis Z (-300.000,0.000)]
> [MSG:INFO: Motor0]
> [MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110]
> [MSG:INFO: Z Pos Limit gpio.32]
> [MSG:INFO: Motor1]
> [MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
> [MSG:INFO: Z2 Pos Limit gpio.34]
> [MSG:INFO: X Axis driver test passed]
> [MSG:INFO: Y Axis driver test passed]
> [MSG:INFO: Y2 Axis driver test passed]
> [MSG:INFO: Z Axis driver test passed]
> [MSG:ERR: Z2 Axis TMC driver not detected - expected 0x21 got 0x0]
> [MSG:INFO: Kinematic system: Cartesian]
> [MSG:INFO: Using spindle NoSpindle]
> [MSG:INFO: Flood coolant gpio.2]
> [MSG:INFO: Mist coolant gpio.16]
> [MSG:INFO: Probe Pin: gpio.36:low]
> [MSG:INFO: STA SSID is not set]
> [MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1]
> [MSG:INFO: AP started]
> [MSG:INFO: WiFi on]
> [MSG:INFO: Captive Portal Started]
> [MSG:INFO: HTTP started on port 80]
> [MSG:INFO: Telnet started on port 23]
> ok
With MOTOR PLUGGED IN:
> $G
> [GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
> ok
> <Idle|MPos:0.000,0.000,0.000|FS:0,0|Pn:Y|WCO:0.000,0.000,0.000>
> <Idle|MPos:0.000,0.000,0.000|FS:0,0|Pn:Y|Ov:100,100,100>
> $SS
> [MSG:INFO: FluidNC v3.7.8]
> [MSG:INFO: Compiled with ESP32 SDK:v4.4.4]
> [MSG:INFO: Local filesystem type is littlefs]
> [MSG:INFO: Configuration file:config.yaml]
> [MSG:INFO: Machine LowRider]
> [MSG:INFO: Board Jackpot TMC2209]
> [MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
> [MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21]
> [MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
> [MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
> [MSG:INFO: Stepping:I2S_static Pulse:4us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
> [MSG:INFO: User Digital Output:0 on Pin:gpio.26]
> [MSG:INFO: User Digital Output:1 on Pin:gpio.27]
> [MSG:INFO: Axis count 3]
> [MSG:INFO: Axis X (0.000,1220.000)]
> [MSG:INFO: Motor0]
> [MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
> [MSG:INFO: X Neg Limit gpio.25]
> [MSG:INFO: Axis Y (0.000,2440.000)]
> [MSG:INFO: Motor0]
> [MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
> [MSG:INFO: Y Neg Limit gpio.33]
> [MSG:INFO: Motor1]
> [MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
> [MSG:INFO: Y2 Neg Limit gpio.35]
> [MSG:INFO: Axis Z (-300.000,0.000)]
> [MSG:INFO: Motor0]
> [MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110]
> [MSG:INFO: Z Pos Limit gpio.32]
> [MSG:INFO: Motor1]
> [MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
> [MSG:INFO: Z2 Pos Limit gpio.34]
> [MSG:INFO: X Axis driver test passed]
> [MSG:INFO: Y Axis driver test passed]
> [MSG:INFO: Y2 Axis driver test passed]
> [MSG:INFO: Z Axis driver test passed]
> [MSG:ERR: Z2 Axis TMC driver not detected - expected 0x21 got 0x0]
> [MSG:INFO: Kinematic system: Cartesian]
> [MSG:INFO: Using spindle NoSpindle]
> [MSG:INFO: Flood coolant gpio.2]
> [MSG:INFO: Mist coolant gpio.16]
> [MSG:INFO: Probe Pin: gpio.36:low]
> [MSG:INFO: STA SSID is not set]
> [MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1]
> [MSG:INFO: AP started]
> [MSG:INFO: WiFi on]
> [MSG:INFO: Captive Portal Started]
> [MSG:INFO: HTTP started on port 80]
> [MSG:INFO: Telnet started on port 23]
> ok
Yes. I will swap X and Z2 drivers and test. Should I turn the Pot all the way down on the troubled driver first?
Just to note that the trouble drive was originally plugged into Y2 and I swapped with Z2 for testing before making this thread. I will still run this test and pull the log file and edit this post.
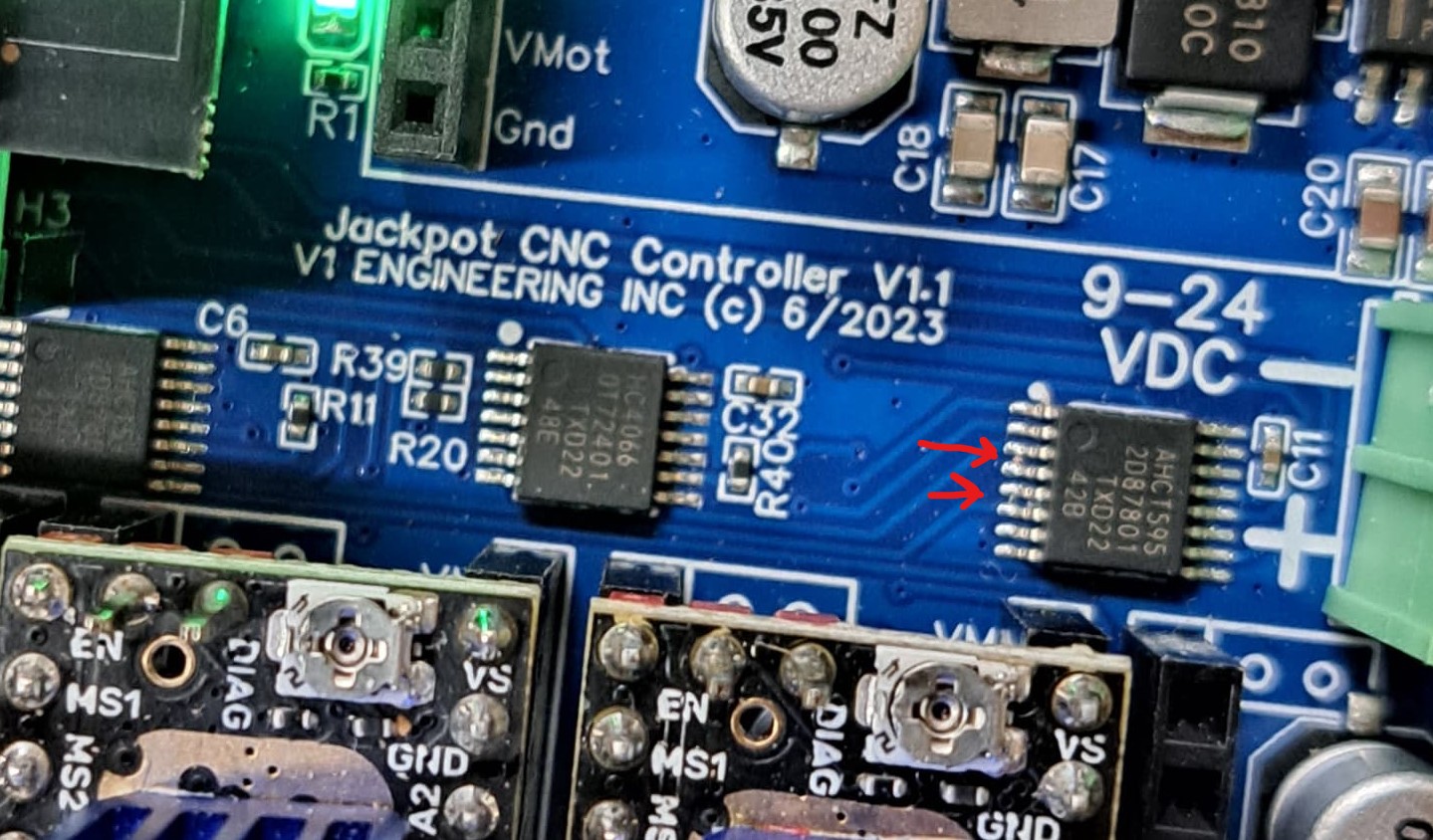
On both boot runs it is showing Z2 error, so it is not the issue we know about. You either have a bad connection, bad driver, or that stuff in the pins.
I’m trying to do this but I’m unable to connect all of a sudden for some reason. Keeps saying incorrect password when trying to logon to the AP. Been working fine.
And now I’m out of time. Gah!
I need to leave work now but can continue this in the morning time.
the vref is really handled by the firmware? i have an intermittent issue where the z motor on one side or another is skipping steps depending on which side has more weight at the time. only ever seems to happen on z homing. no physical binding present that i could feel. was going to ask about setting vref like i have on my printers but maybe i’m thinking about it wrong based on what i’m reading in this thread