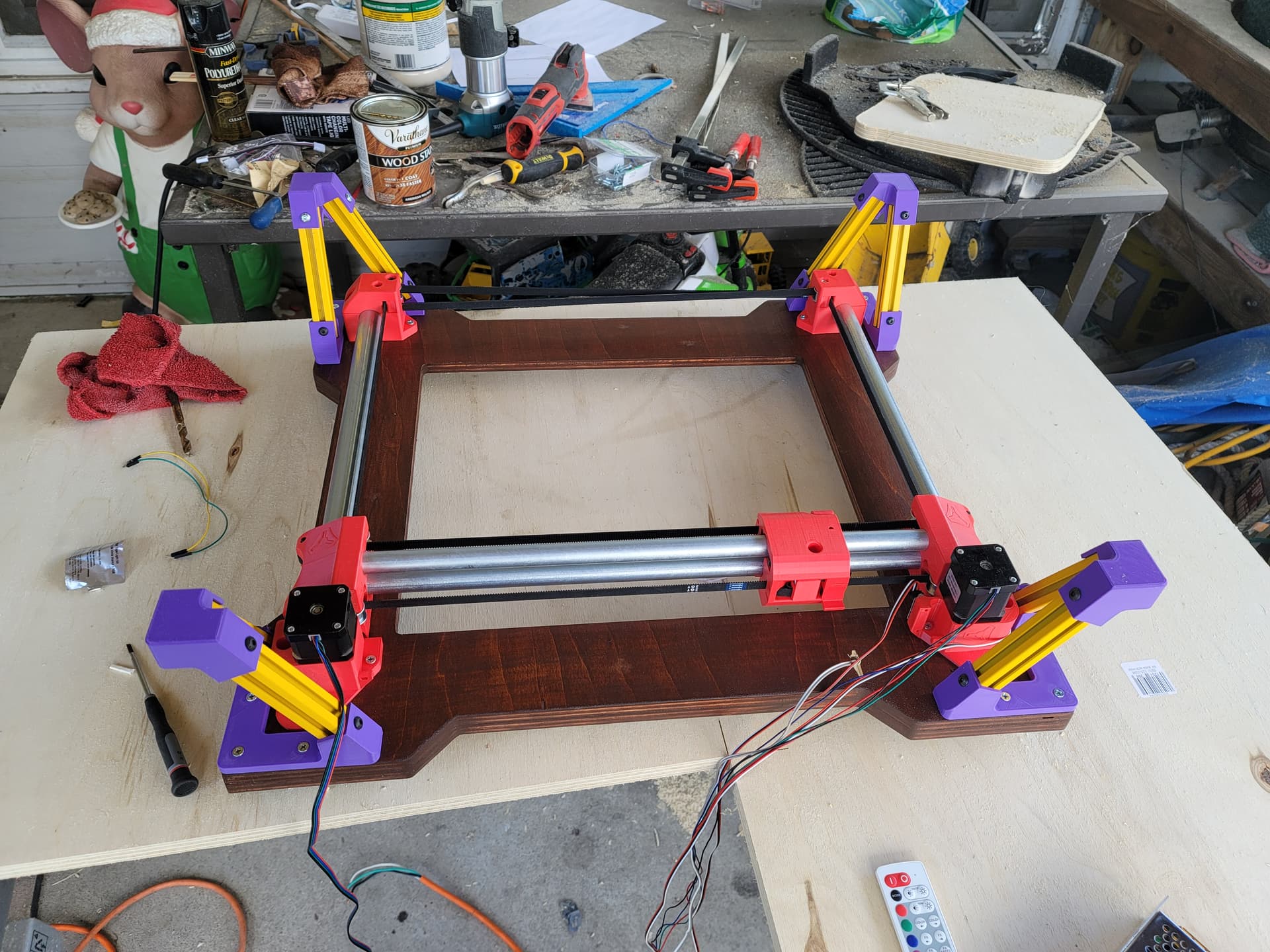
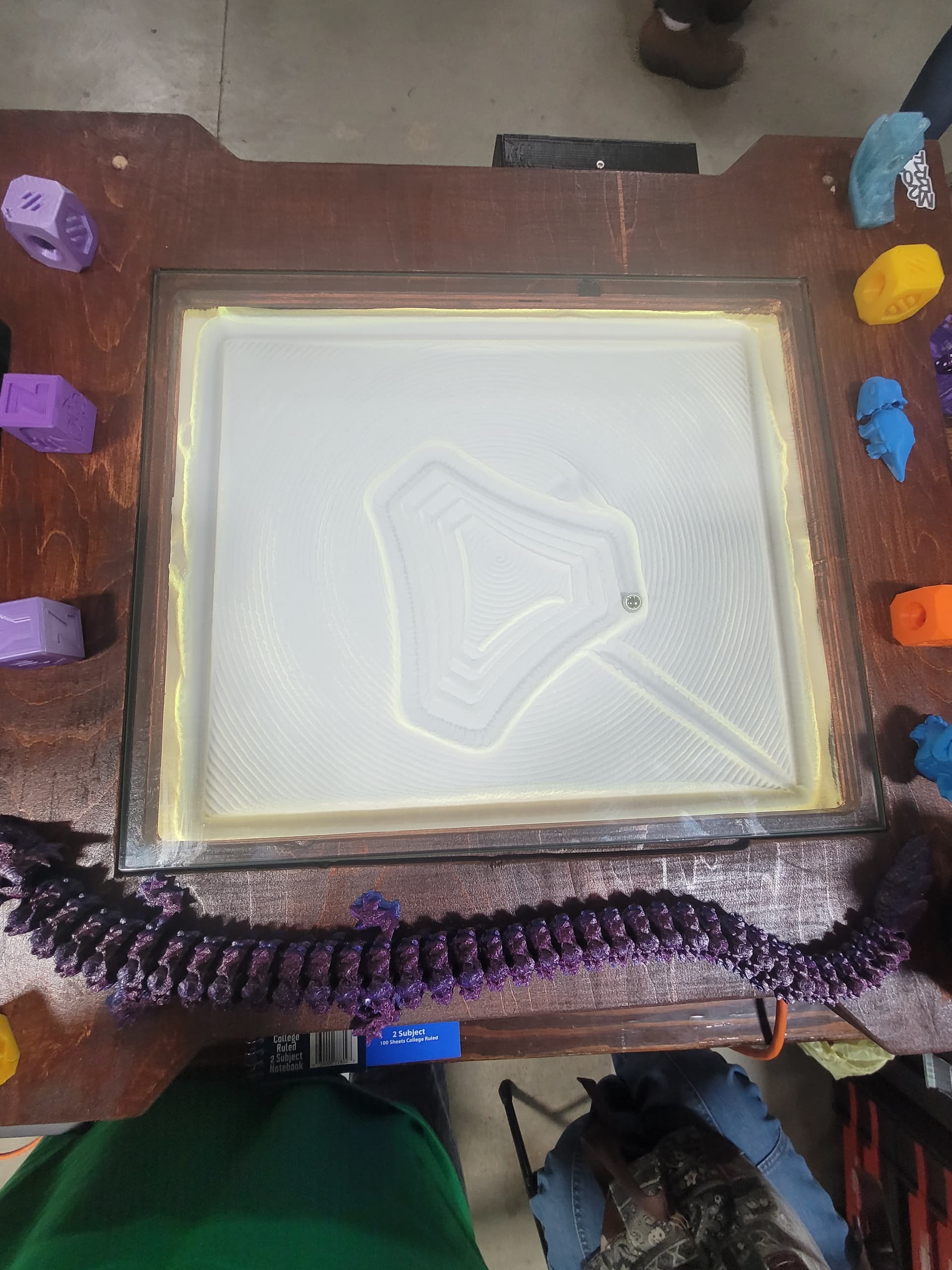
Todays progress




6 Likes
I did make one, GitHub - V1EngineeringInc/FluidNC_Configs: Configuration and support files for the FluidNC boards typically used and V1 Engineering. I actually plan on updating it here shortly. I have two tables ready to get an update.
2 Likes
@vicious1 That config file is for the pen board, I am using the jackpot board. I have a config for it but I have not fully tested it yet.
(Not in YMAL format)
board: Jackpot TMC2209
name: ZenXY Table
meta: 06-04-2024 BradH
kinematics:
coreXY:
stepping:
engine: I2S_static
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
#shared_stepper_disable_pin: NO_PIN
#shared_stepper_reset_pin: NO_PIN
x:
steps_per_mm: 100
max_rate_mm_per_min: 9000
acceleration_mm_per_sec2: 200
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
pulloff_mm: 1
feed_mm_per_min: 300
seek_mm_per_min: 1500
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: gpio.25
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.11
run_amps: 0.68
hold_amps: 0.5
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: I2SO.1
step_pin: I2SO.2
disable_pin: I2SO.0
y:
steps_per_mm: 100
max_rate_mm_per_min: 9000
acceleration_mm_per_sec2: 200
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
pulloff_mm: 1
feed_mm_per_min: 300
seek_mm_per_min: 1500
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: gpio.33
tmc_2209:
uart_num: 1
addr: 1
cs_pin: NO_PIN
r_sense_ohms: 0.11
run_amps: 0.8
hold_amps: 0.5
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
sdcard:
card_detect_pin: NO_PIN
cs_pin: gpio.5
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
start:
must_home: false
1 Like
Ah, shoot sorry. I will need to make one then.
4 Likes
I got everything going. All my axes move the right direction and it homes.
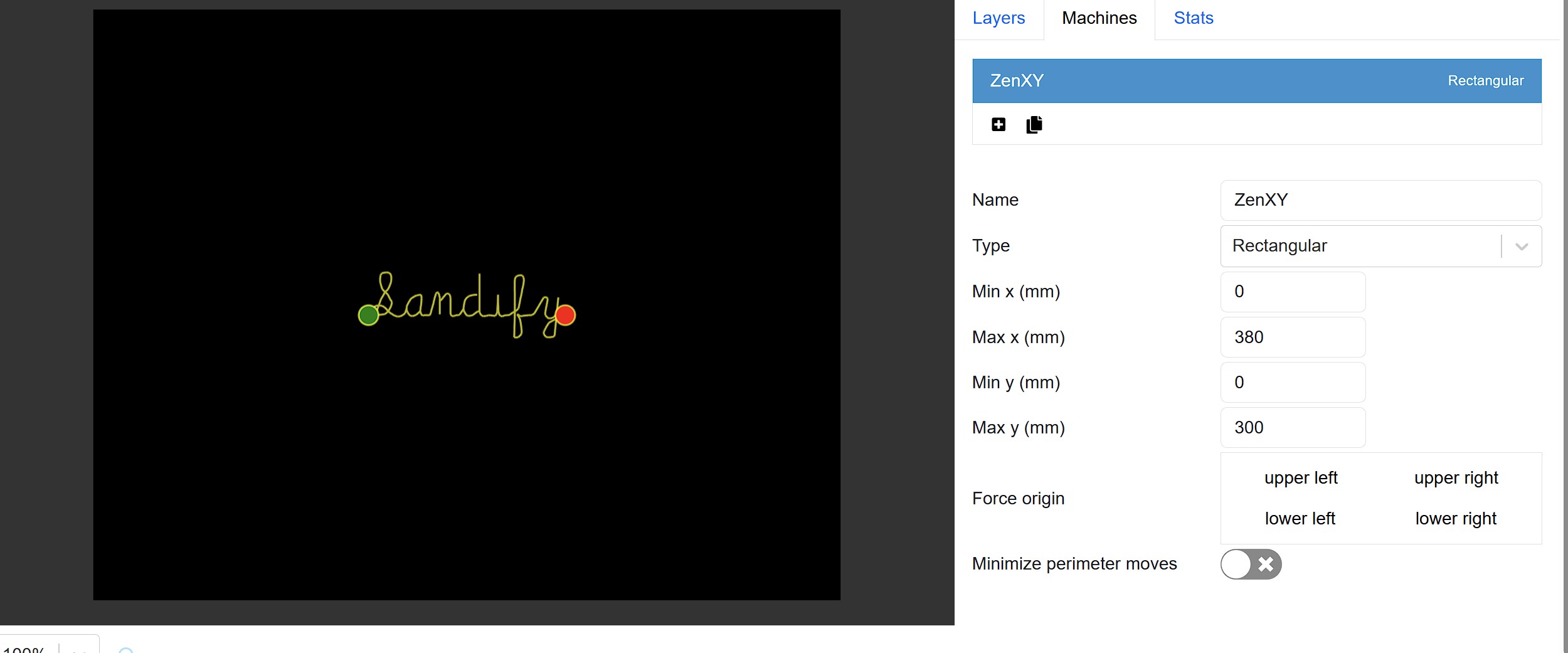
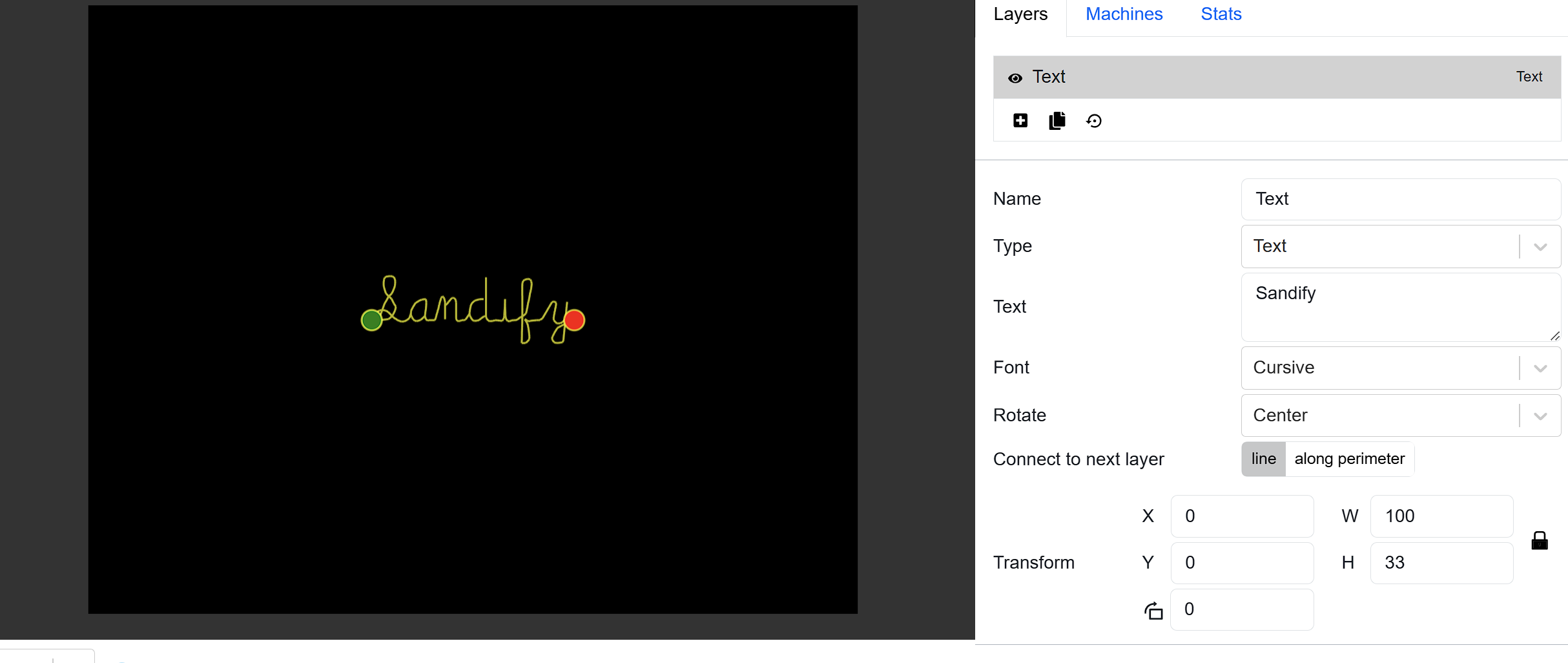
I did a test design in sandify and when I load the gcode and run it, it goes all the way to the right side of the table and hits the soft limit.
X=380 Y=300
My machine homes in the lower left.
My Sandify setting.
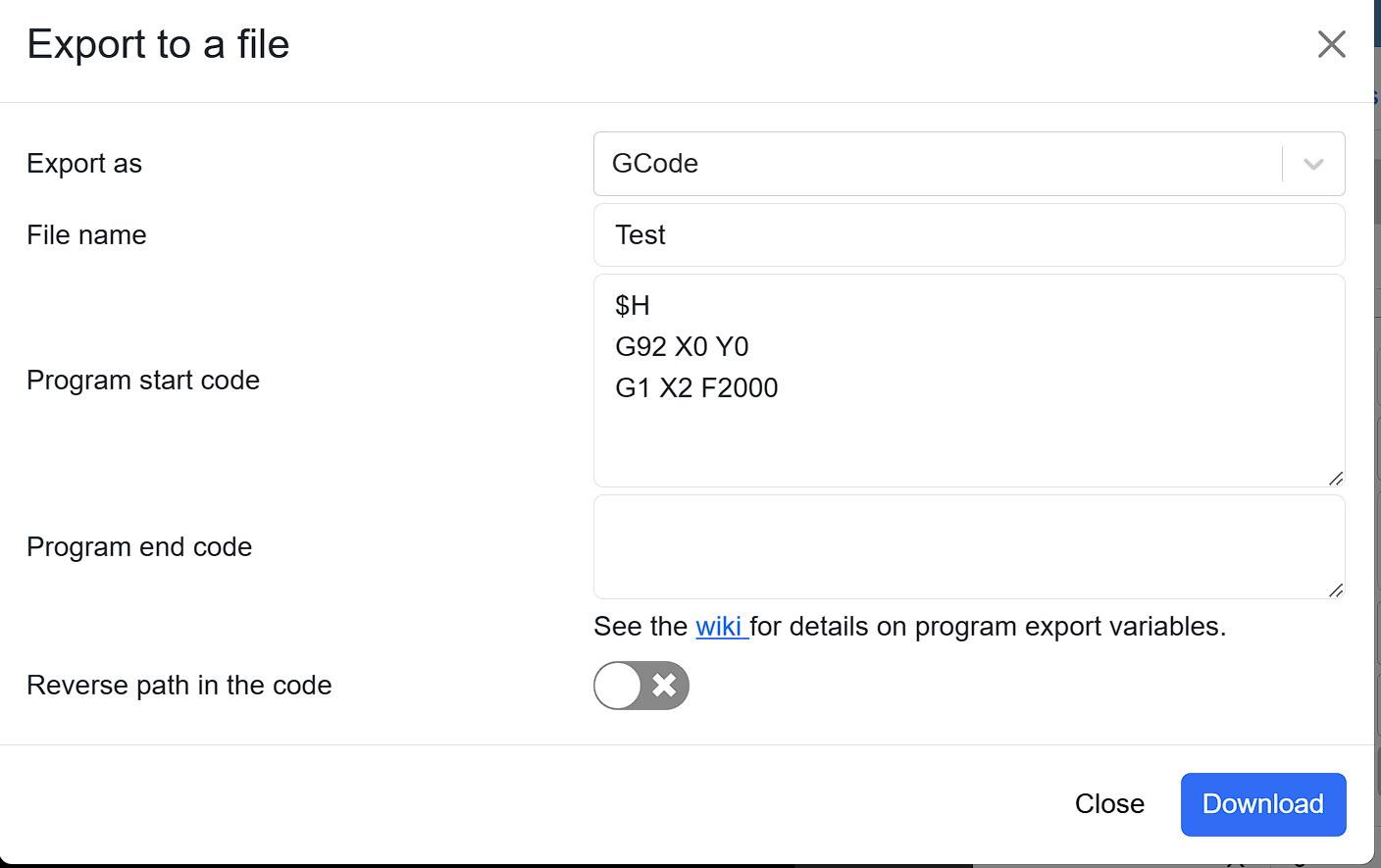
I don’t think you can use $H in the gcode file. Does it actually try to home?
The easiest way to set it up is to just reach under and move it to 0,0. Then set the 0,0 in the UI before running the gcode.
2 Likes
Also. These startup macros are what I eventually landed on:
I can change the gcode on the sdcard and just plug it in at the RMRRF. That saved me from fighting wifi the whole time.
1 Like
Yes it homes Y then X and then goes all the way to the right side and tries to make the picture but stops cause it hits my soft limit
I will try this when i get home from work.
Thank @jeffeb3 I added your start line 0 macro and it works. I am so happy now. Now I need to make stuff for MRRF 2024.
4 Likes
Are you going to be doing a pen board one ? Lol asking for a friend
1 Like
Pretty sure Bart Dring has those in stock now in multiple countries.
1 Like

I bet it pulls in a lot of folks wanting to talk about it!
And running a jackpot as well. What config file are you using for that?
5 Likes
Did you get any mirror tiles for underneath so people can see the action more easily?
Build looks great. Have fun!
5 Likes
Aww man I want to be there!!!
3 Likes
That looks awesome. It will turn some heads. I like that the jackpot is front and center.
I’ll give you a critique though: the baking soda looks too deep to me. It will be a bit sharper if you have it less than half the ball height in total depth. But if that’s a pain. Only the most critical will notice.
Otherwise, it looks beautiful and I’m happy to see the design at another RRF. Hopefully it will be there often.
2 Likes
Cool!
Closing old topics to limit spambots