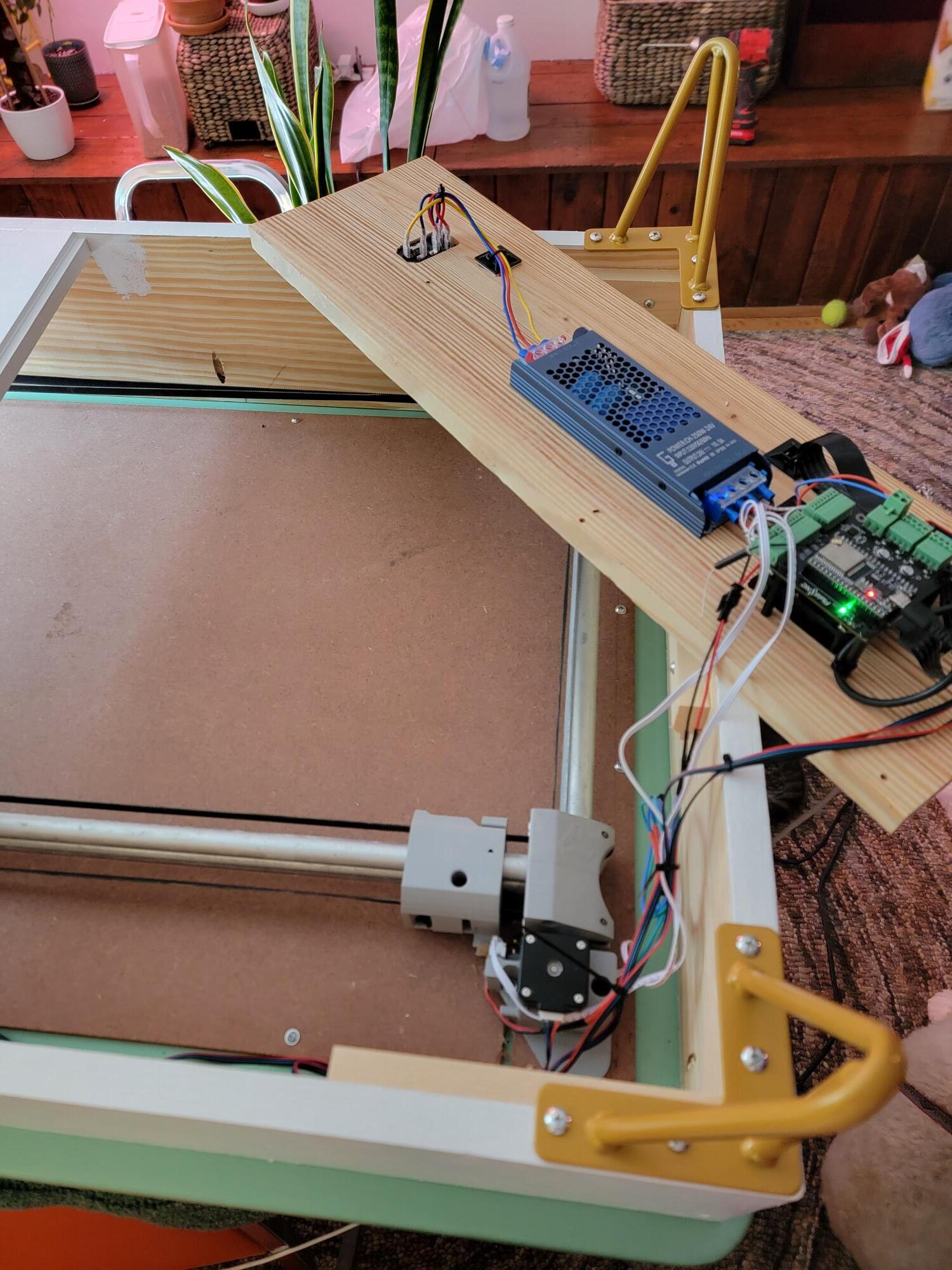
Here is my table.
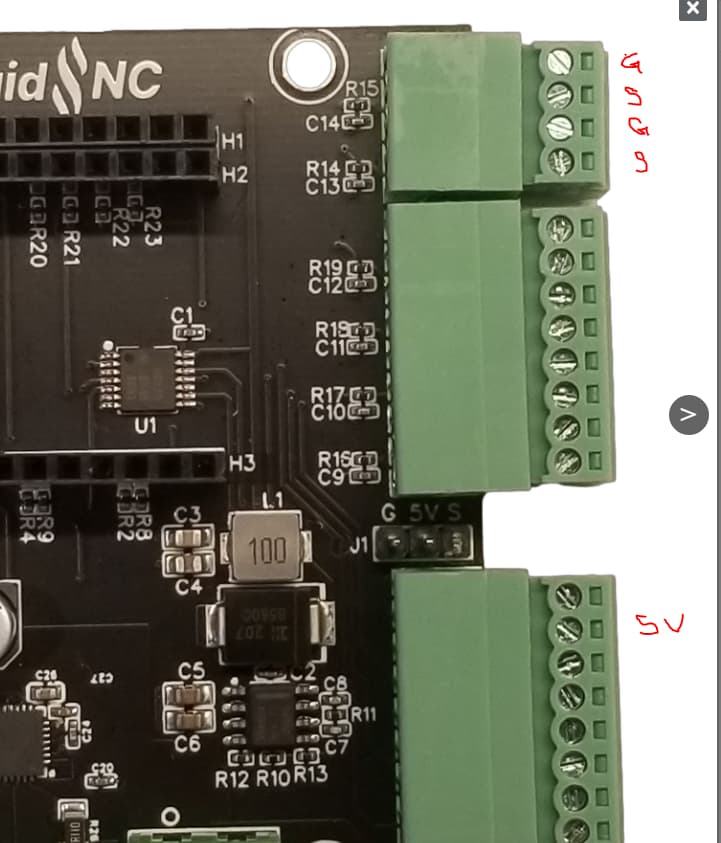
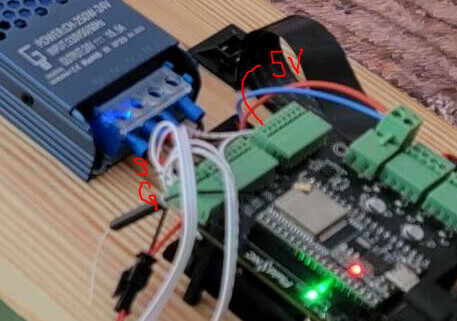
FluidNC 2209 2 axis board, I got mine witht he ESP32 board and antenna - $70
Heat Sinks for the stepper drivers, more for when I had a fan, but they do keep the board cool
https://www.amazon.com/dp/B08PFWMB3J?psc=1&ref=ppx_yo2ov_dt_b_product_details
24v power supply. it is a bit overkill, but I wanted to have something that would last.
https://www.amazon.com/dp/B09MJHCZ28?psc=1&ref=ppx_yo2ov_dt_b_product_details
Steppers - These have plenty of power and are little, set them up at .5a run and .25 hold originally, but the CoreXY needs a little more on the hold, I upped them to .375amp and it seems to be happy.
Extensions for the usb and sd card. I wanted to bring these all tot he outside to make things accessible.
https://www.amazon.com/dp/B082HZKVP1?psc=1&ref=ppx_yo2ov_dt_b_product_details
https://www.amazon.com/dp/B085HLSD6P?psc=1&ref=ppx_yo2ov_dt_b_product_details
Fan - I put this in to keep the board cool. Bad idea, I have disconnected since then, it is not needed at all.
Power cord - 6ft gets me under the rug and to the wall outlet.
https://www.amazon.com/dp/B00005113L?psc=1&ref=ppx_yo2ov_dt_b_product_details
And this for a fused power connection and switch.
https://www.amazon.com/gp/product/B08SK11V9C/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1
LEDs - I am too old to have RGB stuff flashing around. It was tough enough of a sell anyway to my wife to get this thing in the den.
https://www.amazon.com/dp/B0B5X3PB58?psc=1&ref=ppx_yo2ov_dt_b_product_details
I got the glass custom cut and tempered from a local glass place. One note, if you are dealing with a large piece of glass and want to avoid smudges inside the glass after laying it in there, get a set of these. They work great and are cheap.
https://www.amazon.com/dp/B09PG4W3NJ?psc=1&ref=ppx_yo2ov_dt_b_product_details
Hardware, belts, stops, etc was bought from V1 in their kit. I tossed the zinc plate hardware and used socket head button screws in black oxide, because I had them left over from my MPCNC build.
Lumber was bought at Home Depot, but everyone makes their own style, I used hairpin legs from Amazon. I used a 1/4" piece of Tempered Hardboard for the sand bed.
I had high hopes of using beach sand I brought back from vacation and yeah, no. it is like paste, stinks and never gets dry enough. So… I used baking Soda.
This took 3 boxes of Baking soda and I wish I would have only used 2 or a little over. I used a comb to even the layer out, seemed to work well.
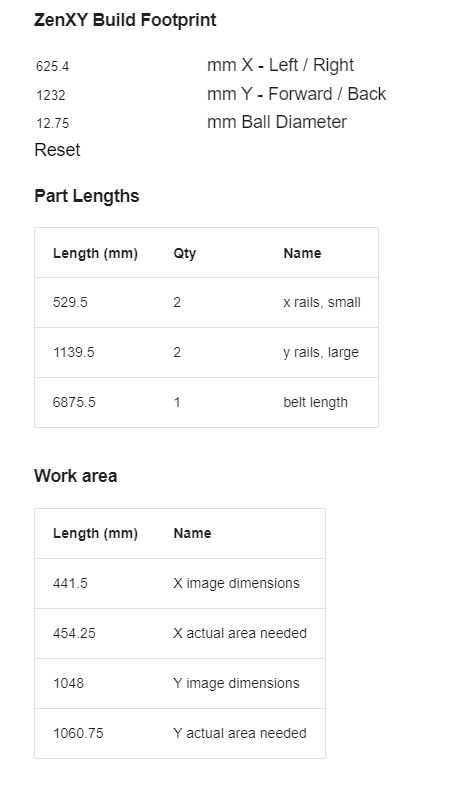
Here is my machine size calculations:
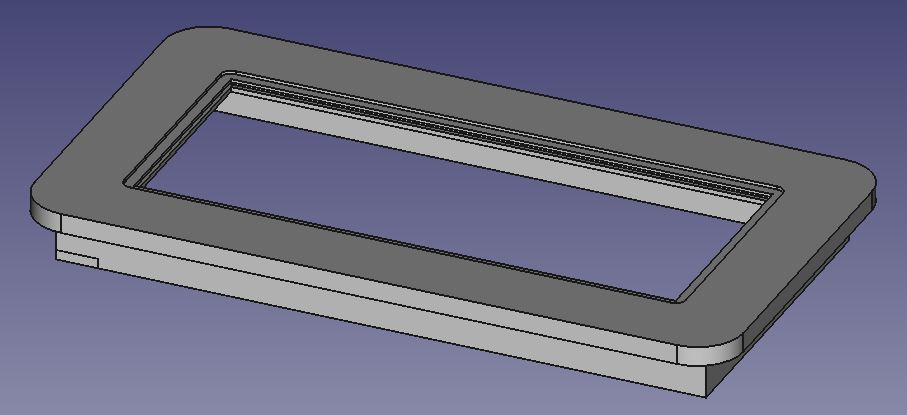
Here is my FreeCad design, the skirt I made from 1x8 yellow pine and put spreaders across and the control panel for the electronics:
A note on the programming of the FluidNC board. I am truly sold on this. It is easy, feature packed, worked with little futzing around and the Wifi feature alone is fantastic. You need to read the entire Wiki. I tried to copy and paste stuff, but that was not working. I actually has to read and study the Wiki and all questions were answered. And in the end, it’s pretty simple. I posted my Yaml file earlier on another post, but this one is the final version and works well. Soft limits caused me headaches and I deleted them once
Here is the file:
name: "TMC2209 XY Zen Table"
board: "FluidNC Pen/Laser 2209"
stepping:
engine: RMT
idle_ms: 255
dir_delay_us: 1
pulse_us: 2
disable_delay_us: 0
kinematics:
corexy:
uart1:
txd_pin: gpio.17
rxd_pin: gpio.16
rts_pin: NO_PIN
cts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: gpio.13:high
x:
steps_per_mm: 100
max_rate_mm_per_min: 2000
acceleration_mm_per_sec2: 25
max_travel_mm: 1000
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 200.000
seek_mm_per_min: 600.000
settle_ms: 500
motor0:
limit_neg_pin: gpio.36:low
#Diag pin is gpio.34
tmc_2209:
uart_num: 1
addr: 0
r_sense_ohms: 0.110
run_amps: 0.500
hold_amps: 0.370
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: gpio.12
step_pin: gpio.14
disable_pin: NO_PIN
motor1:
null_motor:
y:
steps_per_mm: 100
max_rate_mm_per_min: 2000
acceleration_mm_per_sec2: 25
max_travel_mm: 400
soft_limits: False
homing:
cycle: 1
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 200.000
seek_mm_per_min: 600.000
settle_ms: 500
motor0:
limit_neg_pin: gpio.39:low
#diag pin is gpio.35
tmc_2209:
uart_num: 1
addr: 1
r_sense_ohms: 0.110
run_amps: 0.500
hold_amps: 0.370
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: gpio.26
step_pin: gpio.25
disable_pin: NO_PIN
motor1:
null_motor:
z:
steps_per_mm: 320.000
max_rate_mm_per_min: 1000.000
acceleration_mm_per_sec2: 25.000
max_travel_mm: 200.000
soft_limits: false
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
start:
must_home: false
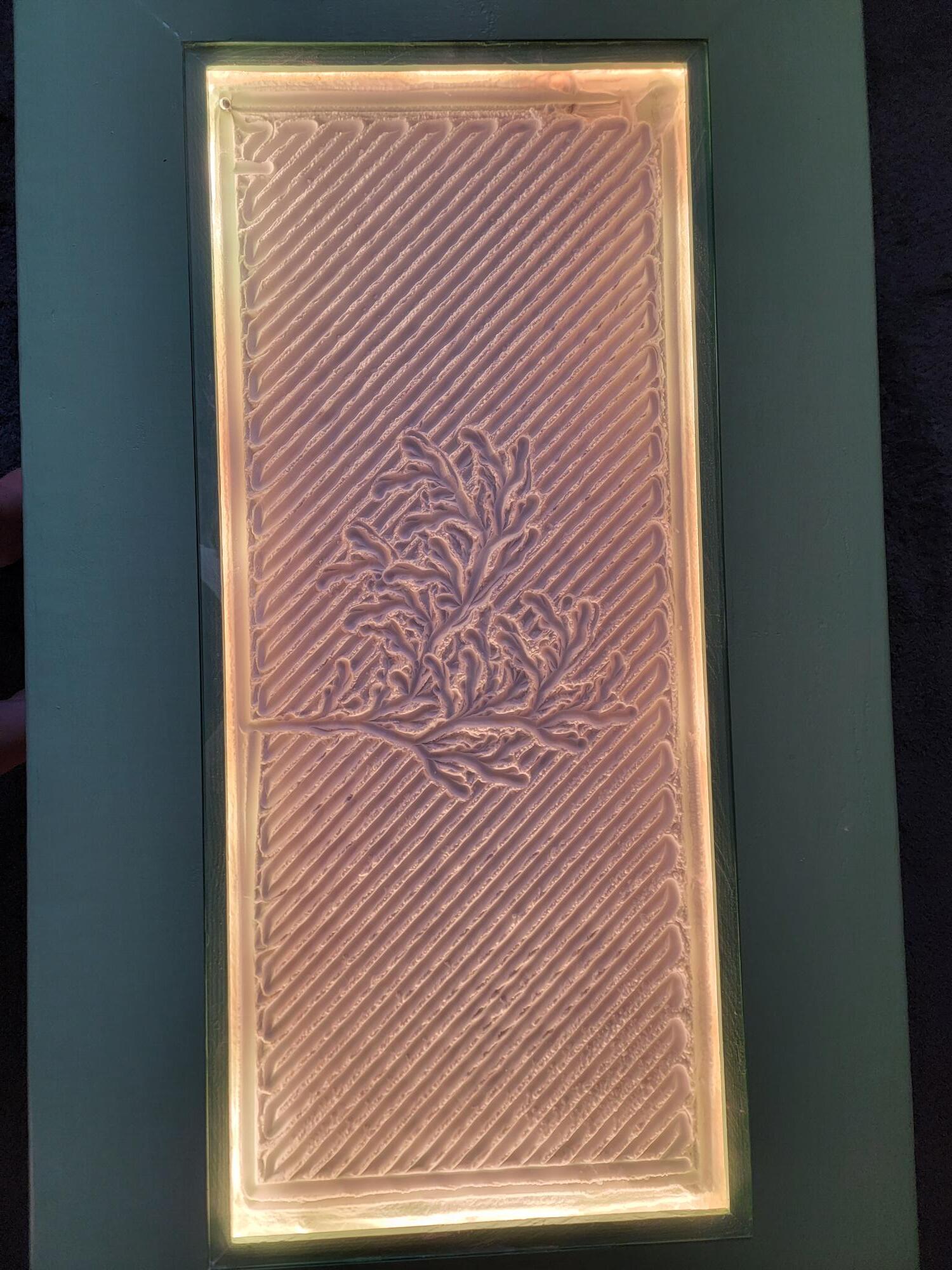
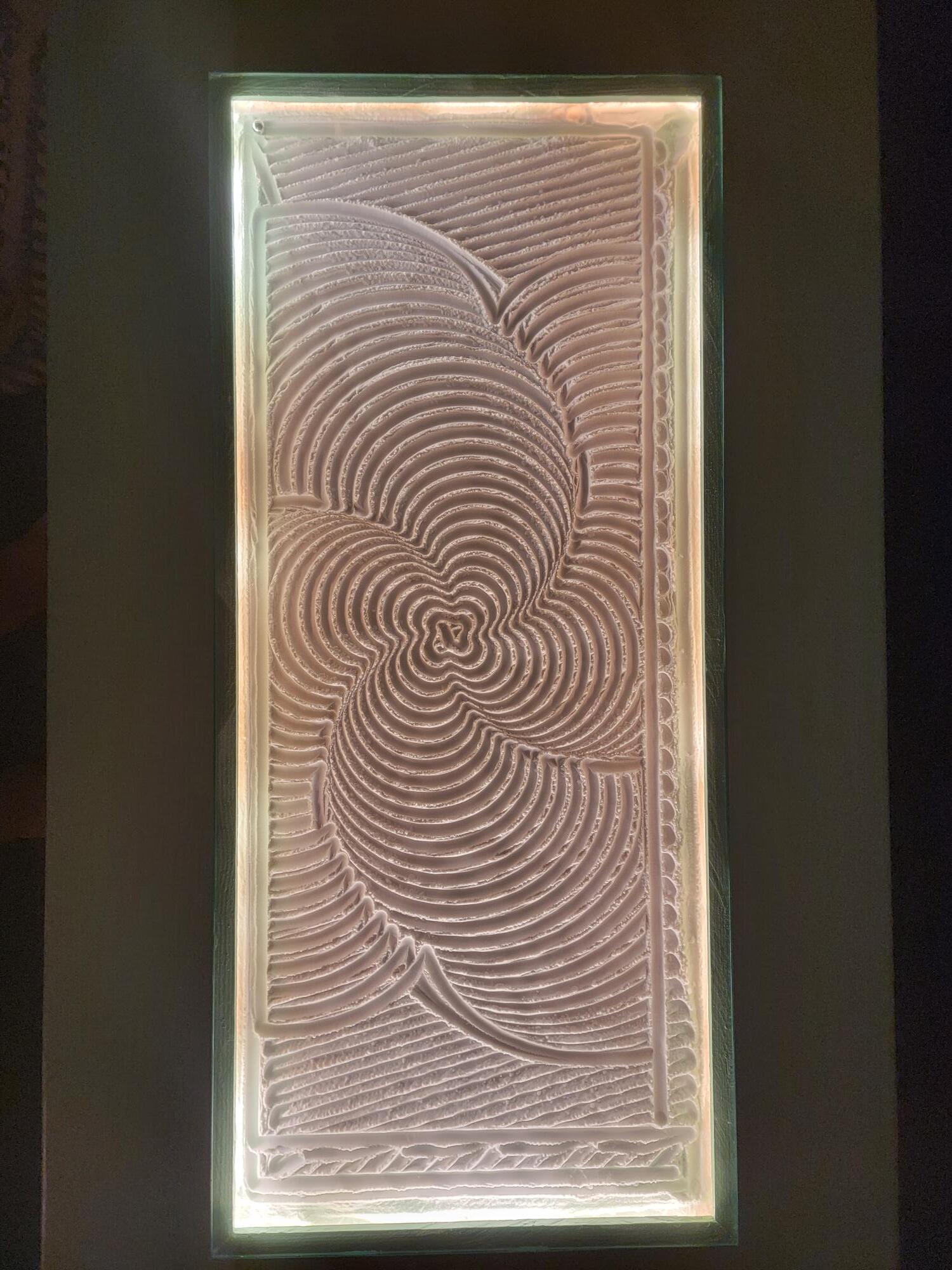
Here is the finished table: Works Great and thank you all for answering my stupid questions from before: