Okay, I figured out the BLTouch issue. Missing a parameter. Now with the Z motors level, the bed map looks a little cooler. Obviously not as flat as it could be, but good enough for the girls I go with…
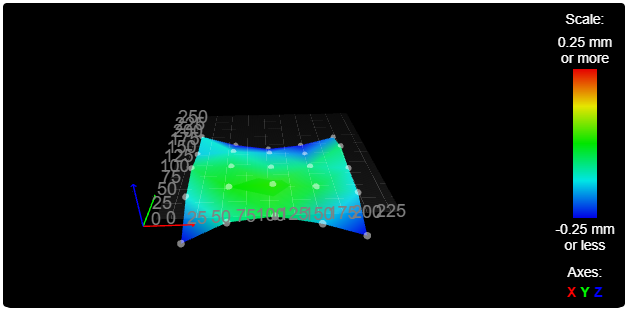
G29
25 points probed, min error -0.360, max error 0.020, mean -0.138, deviation 0.109
Height map saved to file 0:/sys/heightmap.csv
Edit: Where the low points are is close to where the screws are, so maybe they’re a bit too tight. Most of the bed looks pretty good, and the whole point of this printer is for smaller footprint items anyway. If anything were to be close to the edge, I’d use the first Repeat with the 300mm print bed.