The front panel was a royal pain. I think because the 2 front uprights didn’t want to sit quite as square as I would have liked, the slide nuts kept falling out of the track and dropping. Finally I slid the cross bar up as high as I could, under the tension blocks, and put the rest of the slide nuts onto the front piece, and slid it back down into place. Sure enough the top was about 1mm “pinched” in at the top. Now it is not.
If any of the previous panels had given me this much trouble I’d have given up with only the back (which I did first.)
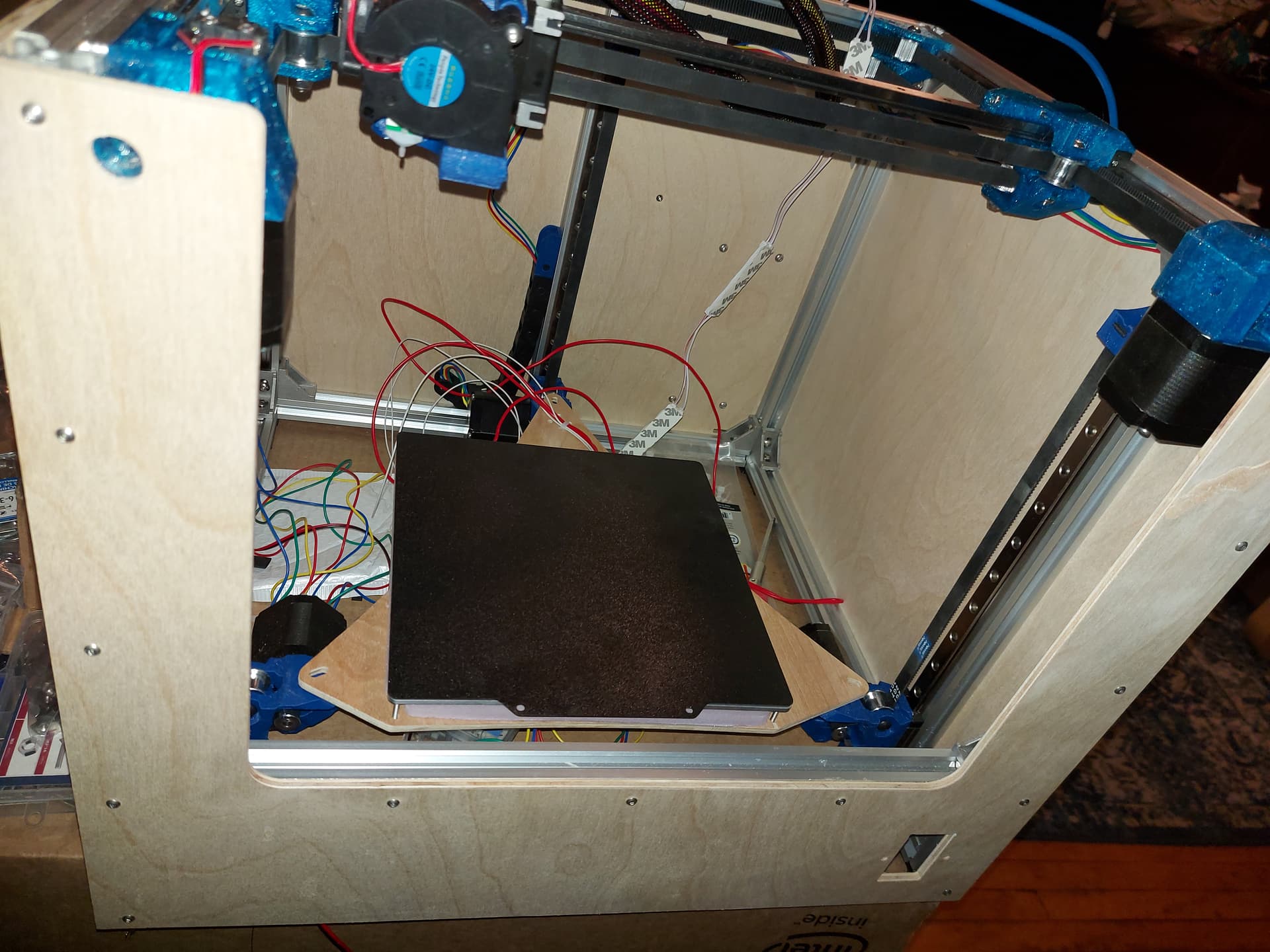
The panel features a 65mm cover on each side, mostly so that it can provide reinforcement to keep the pillars parallel. Also a 12.5mm hole in front of each tension block (I measured 12mm for the part around the screw head) centered on the tension screw. The cross bar on the front is 1/5 of the way up, maybe a little higher than the print bed at its lowest level, but not bad and aesthetically pleasing with where the screws are for the sides and back. There is a power entry hole there as well. I’ll need to do something about wiee manage.ent for AC power, I had intended to put power entry at the back, but wanted a switch up front anyway.
I did grab my LED pucks… The rest is wiring, and maybe a nicer solution for the filament tube
At some point I will likely want a better solution for mounting the Duet, but I think the holder that I printed will do the job nicely. Maybe that will be a 3D printed project that I can do on this printer… but probably not.
So aside from mounting the LED pucks, I think this is mechanically complete. The LEDs have 3M adhesive backing so that should be easy enough. I also want to add a mount (and power) for an ESP32cam. I believe that I can take 5V from the SBC power feed, and thst I won’t need any other signal from the Duet. The DWC has a place for a URL to grab a camera feed from. Maybe I can make the camera take a series of stills for time-lapse print footage.