I call this LR3 the “Rat Rod” because it was cobbled together from parts obtained from a LR2 and spare parts and other random oddities that were sitting about in the shop. It is printed entirely from PETG. Almost all the 3D printed parts were sufficiently rigid with the exception of the belt holders which I modified the design or made a new design for the Y axis belt holders.
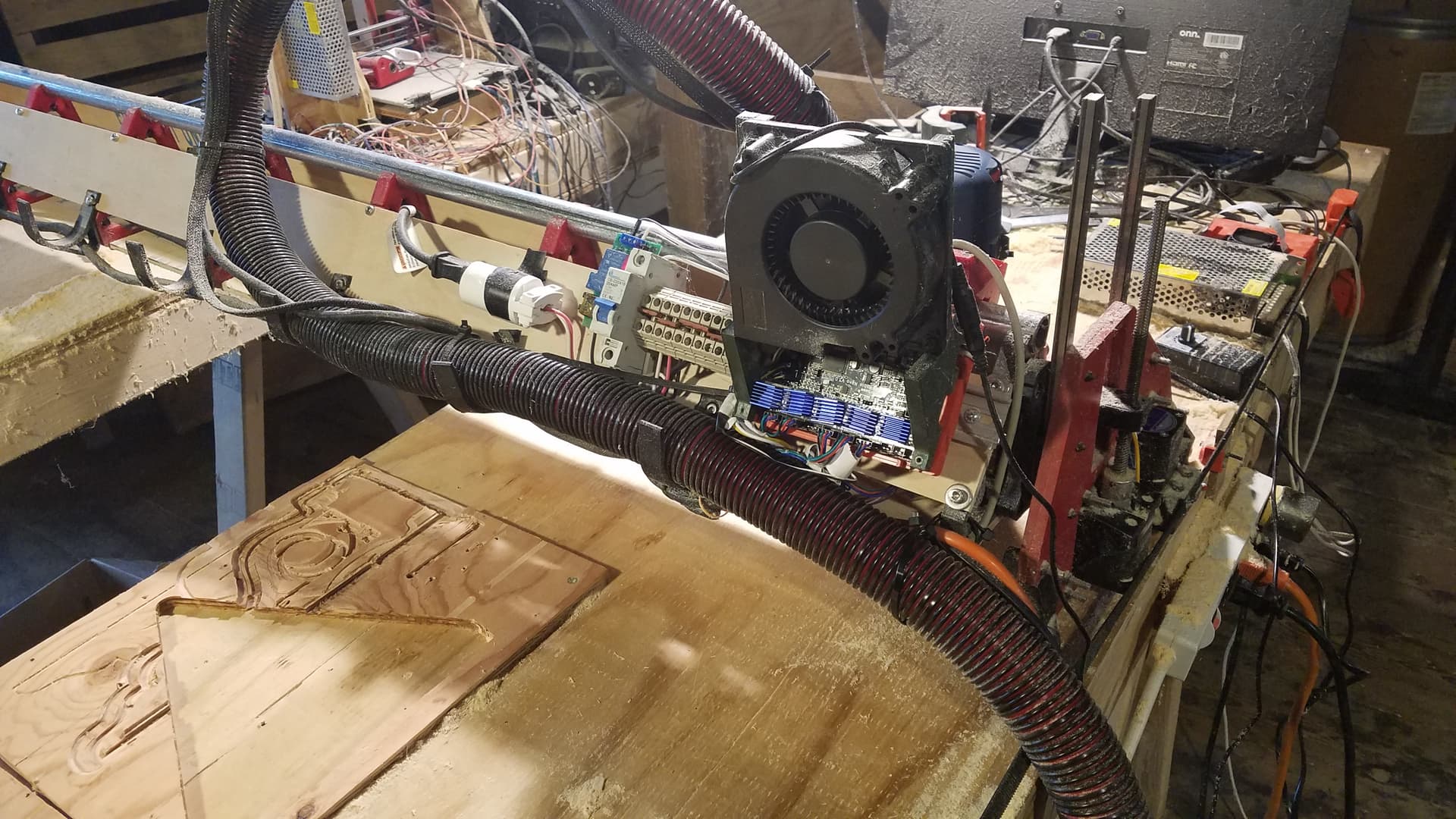
I attempted to tweak the performance of the unit by adding a 2.25hp Bosch router and maxing out the tmc drivers by running them at 27V and 1.75A. The massive blower on the driver heatsinks is needed otherwise the tmc drivers would throw an excess temperature error.
The 10 x 5 ft table is made from leftover scaffolding platforms that are bolted to the wall and supported by sawhorses. I have some 1in MDF sheet that I intend to build a clamping system.
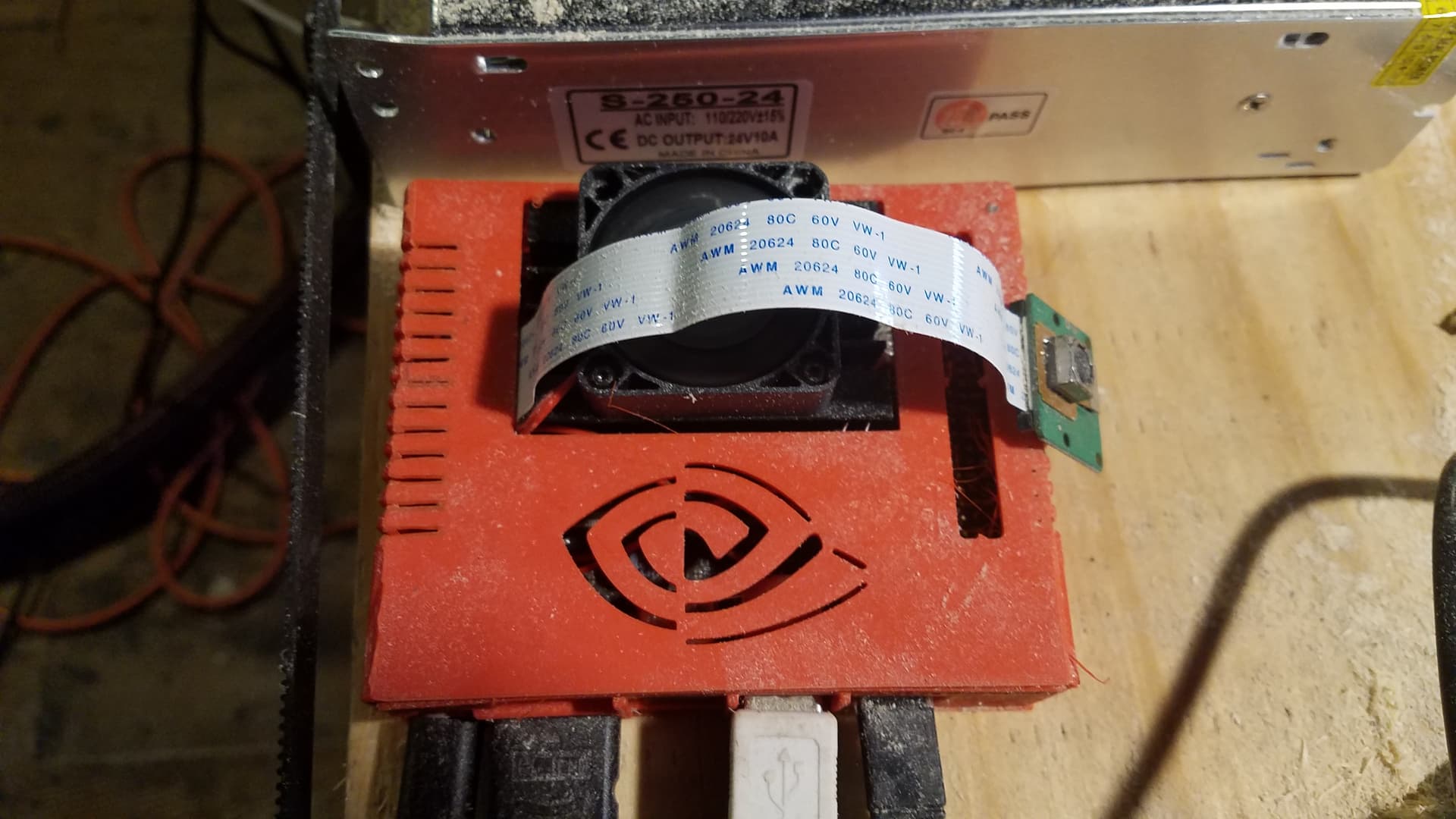
The software/firmware is Klipper and the host computer is a Jetson Nano. Klipper uses the 128 core GPU to perform calculations and there’s plenty of spare bandwidth. Also installed on the Jetson is OpenCV with an auto-focus camera, ROS and CUDA. I view this unit as more of an autonomous robot than a CNC machine, but there is much more programming work needed for this type of transformation. I intend to add a second smaller core to mount the Jetson and camera that would enable inspection with OpenCV and scanning of large flat objects.
So far I have made some decorative architectural pieces with the unit and am pleased with the results. I have also made joinery pieces with the unit - Tsugite to be more specific, which is a type of elaborate Japanese joinery made by master craftsman after years of training and experience. The results are very promising. One of the goals I have is to be able to fabricate tiny homes with the LR3 that can be fastened together with Tsugite and wooden pins.
This LR3 is still very much a work in progress but it seems to be a very robust and economical CNC robot.

Drivers with massive blower:
Jetson Nano: