Hi Everyone,
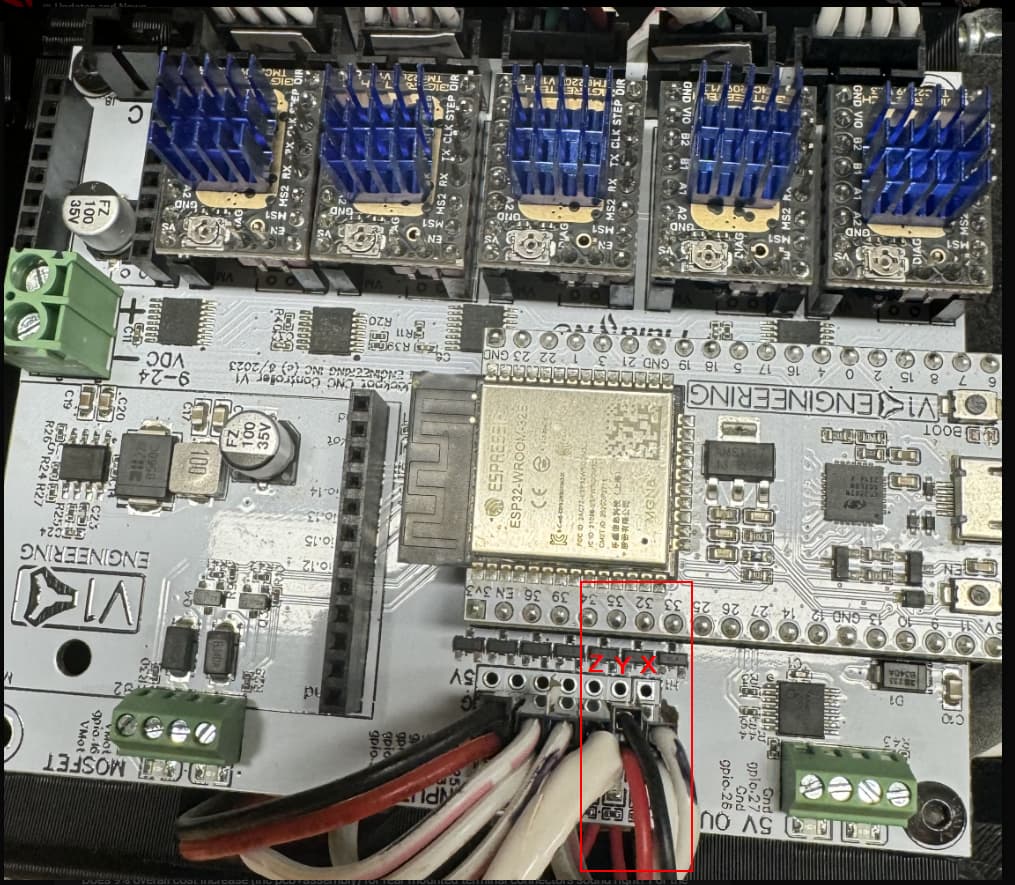
Excited to build my first zen! Not quite sure what the correct wiring is here, any pointers on connecting to the jackpot?
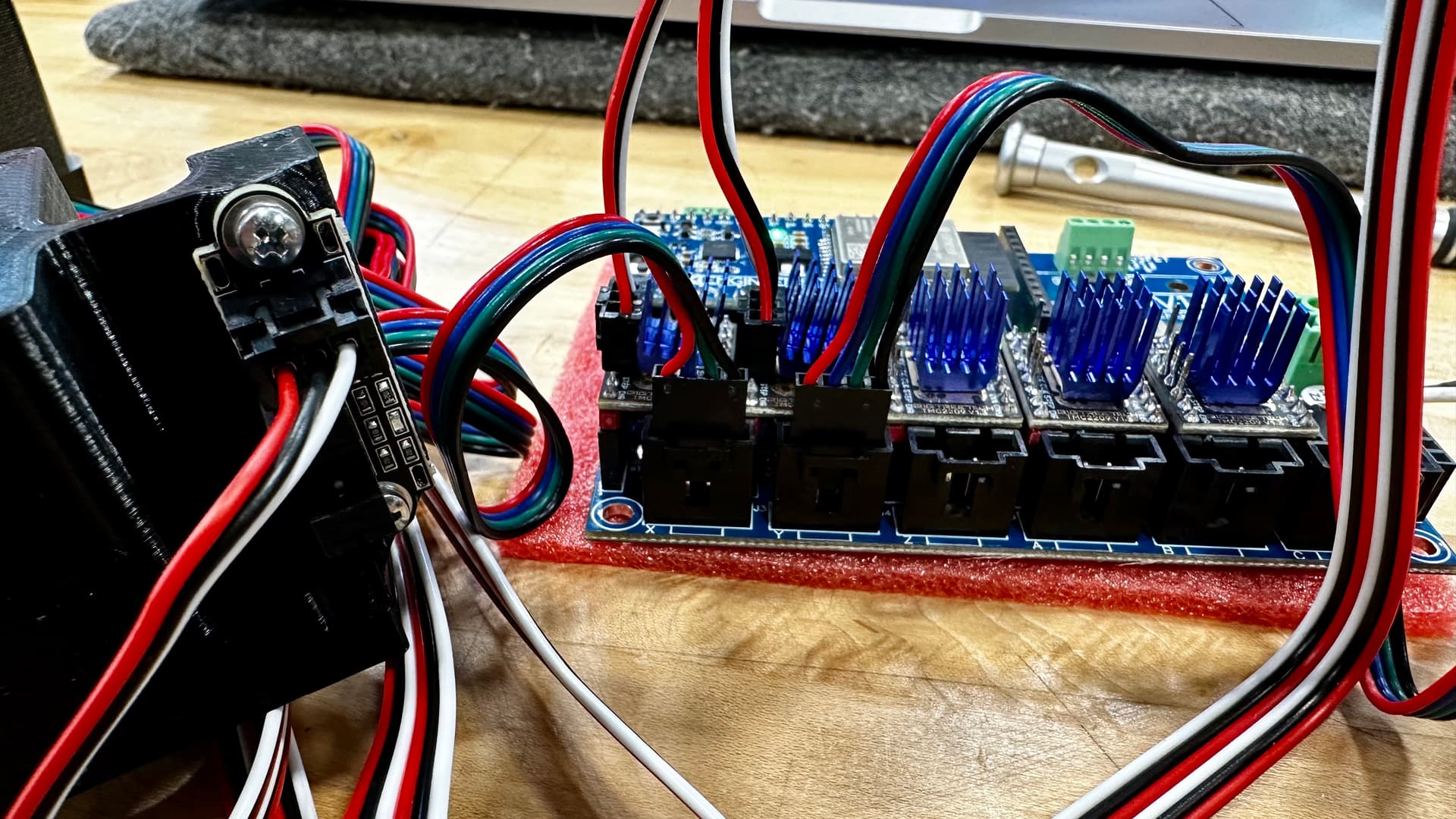
Here’s the config yaml (in case it helps).
board: Jackpot TMC2209
name: ZenXY
meta: 09-10-2024 RyanZ
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
kinematics:
corexy:
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#X
motor0:
limit_neg_pin: gpio.25:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: I2SO.1
step_pin: I2SO.2
disable_pin: I2SO.0
y:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 2440
soft_limits: false
homing:
cycle: 1
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#Y
motor0:
limit_neg_pin: gpio.33:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 1
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
#A
#motor1:
# limit_neg_pin: gpio.35:high
# limit_pos_pin: NO_PIN
# limit_all_pin: NO_PIN
# hard_limits: false
# pulloff_mm: 4.000
# tmc_2209:
# uart_num: 1
# addr: 3
# cs_pin: i2so.14
# r_sense_ohms: 0.110
# run_amps: 0.800
# homing_amps: 0.800
# hold_amps: 0.500
# microsteps: 8
# stallguard: 0
# stallguard_debug: false
# toff_disable: 0
# toff_stealthchop: 5
# toff_coolstep: 3
# run_mode: StealthChop
# homing_mode: StealthChop
# use_enable: false
# step_pin: I2SO.13
# direction_pin: I2SO.12
# disable_pin: I2SO.15
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 1200.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 0
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 2
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
#B
# motor1:
# limit_neg_pin: NO_PIN
# limit_pos_pin: gpio.34:high
# limit_all_pin: NO_PIN
# hard_limits: false
# pulloff_mm: 4.000
# tmc_2209:
# uart_num: 1
# addr: 3
# cs_pin: i2so.19
# r_sense_ohms: 0.110
# run_amps: 0.800
# homing_amps: 0.800
# hold_amps: 0.500
# microsteps: 8
# stallguard: 0
# stallguard_debug: false
# toff_disable: 0
# toff_stealthchop: 5
# toff_coolstep: 3
# run_mode: StealthChop
# homing_mode: StealthChop
# use_enable: false
# step_pin: I2SO.18
# direction_pin: I2SO.17
# disable_pin: I2SO.16
# c:
# steps_per_mm: 80.000
# max_rate_mm_per_min: 5000.000
# acceleration_mm_per_sec2: 100.000
# max_travel_mm: 300.000
# soft_limits: false
# homing:
# cycle: 0
# positive_direction: true
# mpos_mm: 150.000
# feed_mm_per_min: 100.000
# seek_mm_per_min: 800.000
# settle_ms: 500
# seek_scaler: 1.100
# feed_scaler: 1.100
#
# motor0:
# limit_neg_pin: gpio.39:low
# limit_pos_pin: NO_PIN
# limit_all_pin: NO_PIN
# hard_limits: false
# pulloff_mm: 3.000
# tmc_2209:
# uart_num: 1
# addr: 3
# cs_pin: i2so.22
# r_sense_ohms: 0.110
# run_amps: .8
# homing_amps: 0.800
# hold_amps: 0.050
# microsteps: 16
# stallguard: 0
# stallguard_debug: false
# toff_disable: 0
# toff_stealthchop: 5
# toff_coolstep: 3
# run_mode: StealthChop
# homing_mode: StealthChop
# use_enable: false
# step_pin: I2SO.21
# direction_pin: I2SO.20
# disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: NO_PIN
digital3_pin: NO_PIN
#Laser:
# pwm_hz: 5000
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# tool_num: 0
# speed_map: 0=0.000% 255=100.000%
# off_on_alarm: true
# pwm:
# pwm_hz: 5000
# direction_pin: gpio.26
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: false
# 5V out gpio.26/27
# VMot out gpoi.2/16
# In's left to right gpoi.25/33/32/35/34/39/36