Trying to jog both Z1 and Z2.
Z2 works up and down. Z1 only works going down.
I swapped the Z1 connector the opposite way, Z1 only works going up.
Maybe wiring of the stepper. I swap Z1 stepper with Z2 stepper. Now Z2 stepper only goes in one direction.
Maybe the stepper driver. I swap stepper drivers, same issue.
Maybe Z1 board issue, I utilize the unused “C” stepper driver socket, change the config for Z1 to point to C and works as intended.
Save a copy of the cofiguration using C that seems to work for you.$SS
$SS
[MSG:INFO: FluidNC v3.7.12 https://github.com/bdring/FluidNC]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.4]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config.yaml]
[MSG:INFO: Machine LowRider]
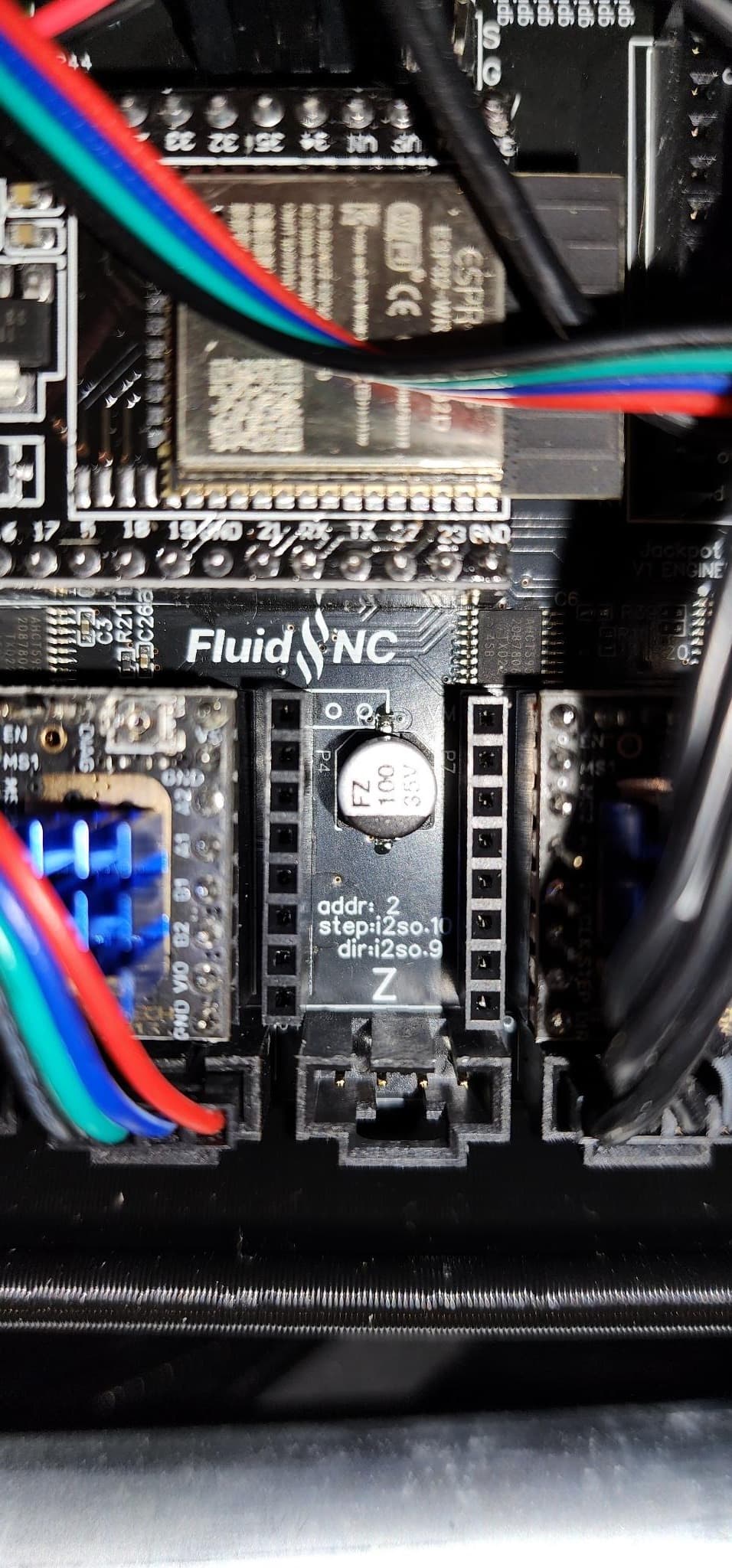
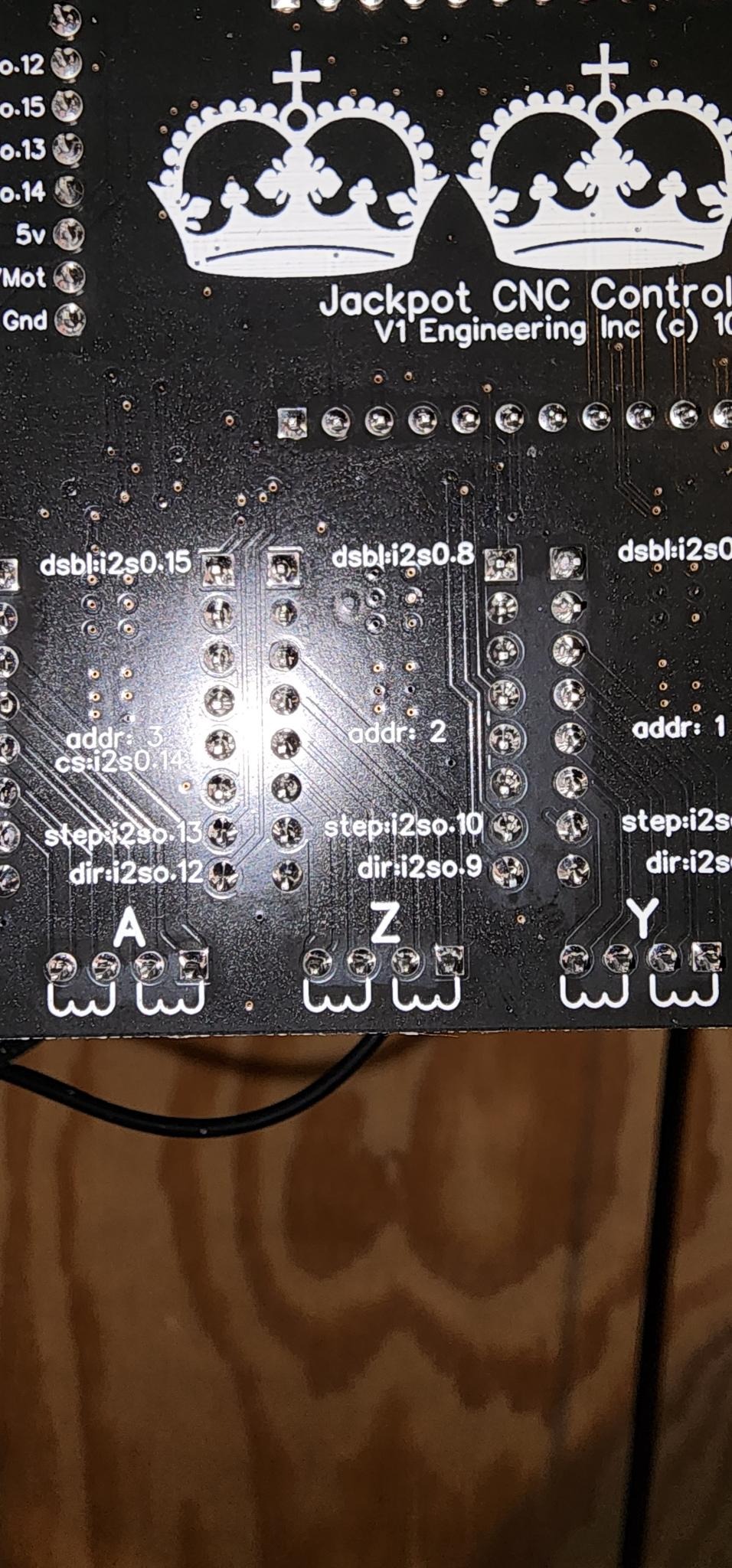
[MSG:INFO: Board Jackpot TMC2209]
[MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21]
[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
[MSG:INFO: Stepping:I2S_static Pulse:4us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
[MSG:INFO: User Digital Output:0 on Pin:gpio.26]
[MSG:INFO: User Digital Output:1 on Pin:gpio.27]
[MSG:INFO: Axis count 3]
[MSG:INFO: Axis X (0.000,1220.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
[MSG:INFO: X Neg Limit gpio.25]
[MSG:INFO: Axis Y (0.000,2440.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
[MSG:INFO: Y Neg Limit gpio.33]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
[MSG:INFO: Z2 Pos Limit gpio.34]
[MSG:INFO: X Axis driver test passed]
[MSG:INFO: Y Axis driver test passed]
[MSG:INFO: Y2 Axis driver test passed]
[MSG:INFO: Z Axis driver test passed]
[MSG:INFO: Z2 Axis driver test passed]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: Using spindle NoSpindle]
[MSG:INFO: Flood coolant gpio.2]
[MSG:INFO: Mist coolant gpio.16]
[MSG:INFO: Probe Pin: gpio.36:low]
[MSG:INFO: STA SSID is not set]
[MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1]
[MSG:INFO: AP started]
[MSG:INFO: WiFi on]
[MSG:INFO: Captive Portal Started]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
ok
Startup
$G
<Idle|MPos:0.000,0.000,327.000|FS:0,0|Pn:YZ>
<Idle|MPos:0.000,0.000,327.000|FS:0,0|Pn:YZ|Ov:100,100,100>
<Idle|MPos:0.000,0.000,327.000|FS:0,0|Pn:YZ>
<Idle|MPos:0.000,0.000,327.000|FS:0,0|Pn:YZ>
Strange… there is a Z2 message interleaved with the Y/X section of the startup messages.
DougJoseph
January 2, 2024, 6:13am
5
Welcome!
Please do post your config.yaml file so we can have a look!
Original
name: LowRider
meta: 11-29-2023 RyanZ
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 3
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#X
motor0:
limit_neg_pin: gpio.25:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: I2SO.1
step_pin: I2SO.2
disable_pin: I2SO.0
y:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 2440
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#Y
motor0:
limit_neg_pin: gpio.33:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 1
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
#A
motor1:
limit_neg_pin: gpio.35:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 1200.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 2
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
#B
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.19
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
# c:
# steps_per_mm: 80.000
# max_rate_mm_per_min: 5000.000
# acceleration_mm_per_sec2: 100.000
# max_travel_mm: 300.000
# soft_limits: false
# homing:
# cycle: 0
# positive_direction: true
# mpos_mm: 150.000
# feed_mm_per_min: 100.000
# seek_mm_per_min: 800.000
# settle_ms: 500
# seek_scaler: 1.100
# feed_scaler: 1.100
#
# motor0:
# limit_neg_pin: gpio.39:low
# limit_pos_pin: NO_PIN
# limit_all_pin: NO_PIN
# hard_limits: false
# pulloff_mm: 3.000
# tmc_2209:
# uart_num: 1
# addr: 3
# cs_pin: i2so.22
# r_sense_ohms: 0.110
# run_amps: .1
# hold_amps: 0.050
# microsteps: 16
# stallguard: 0
# stallguard_debug: false
# toff_disable: 0
# toff_stealthchop: 5
# toff_coolstep: 3
# run_mode: StealthChop
# homing_mode: StealthChop
# use_enable: false
# step_pin: I2SO.21
# direction_pin: I2SO.20
# disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: NO_PIN
digital3_pin: NO_PIN
#Laser:
# pwm_hz: 5000
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# tool_num: 0
# speed_map: 0=0.000% 255=100.000%
# off_on_alarm: true
# pwm:
# pwm_hz: 5000
# direction_pin: gpio.26
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: false
# 5V out gpio.26/27
# VMot out gpoi.2/16
# In's left to right gpoi.25/33/32/35/34/39/36
Updated Z1 to C
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 1200.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.22
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
DougJoseph
January 2, 2024, 8:52am
7
BR:
Maybe wiring of the stepper. I swap Z1 stepper with Z2 stepper. Now Z2 stepper only goes in one direction.
Maybe the stepper driver. I swap stepper drivers, same issue.
Maybe Z1 board issue, I utilize the unused “C” stepper driver socket, change the config for Z1 to point to C and works as intended.
I’m reading and following along with your steps toward a process of elimination.
Did I understand correctly that the problem went away completely when you switched from the config.yaml’s Z stepper driver/code for Z1, and instead switched the wiring and the config.yaml code to use the C stepper driver/code for Z1?
If so, then it seems the issue is in the board. Prior to reading “change the config for Z1 to point to C and works as intended” I would have suspected a wiring issue as the main culprit.
Yes, I switched the wiring and config yaml to use C stepper instead of Z1
1 Like
You’ve done a great job of troubleshooting this and of swapping things around.
The one thing I would double check is whether you have extensions in the wiring to the stppers- that there isn’t an intermittent connection in the extension wiring (If you have extensions.)
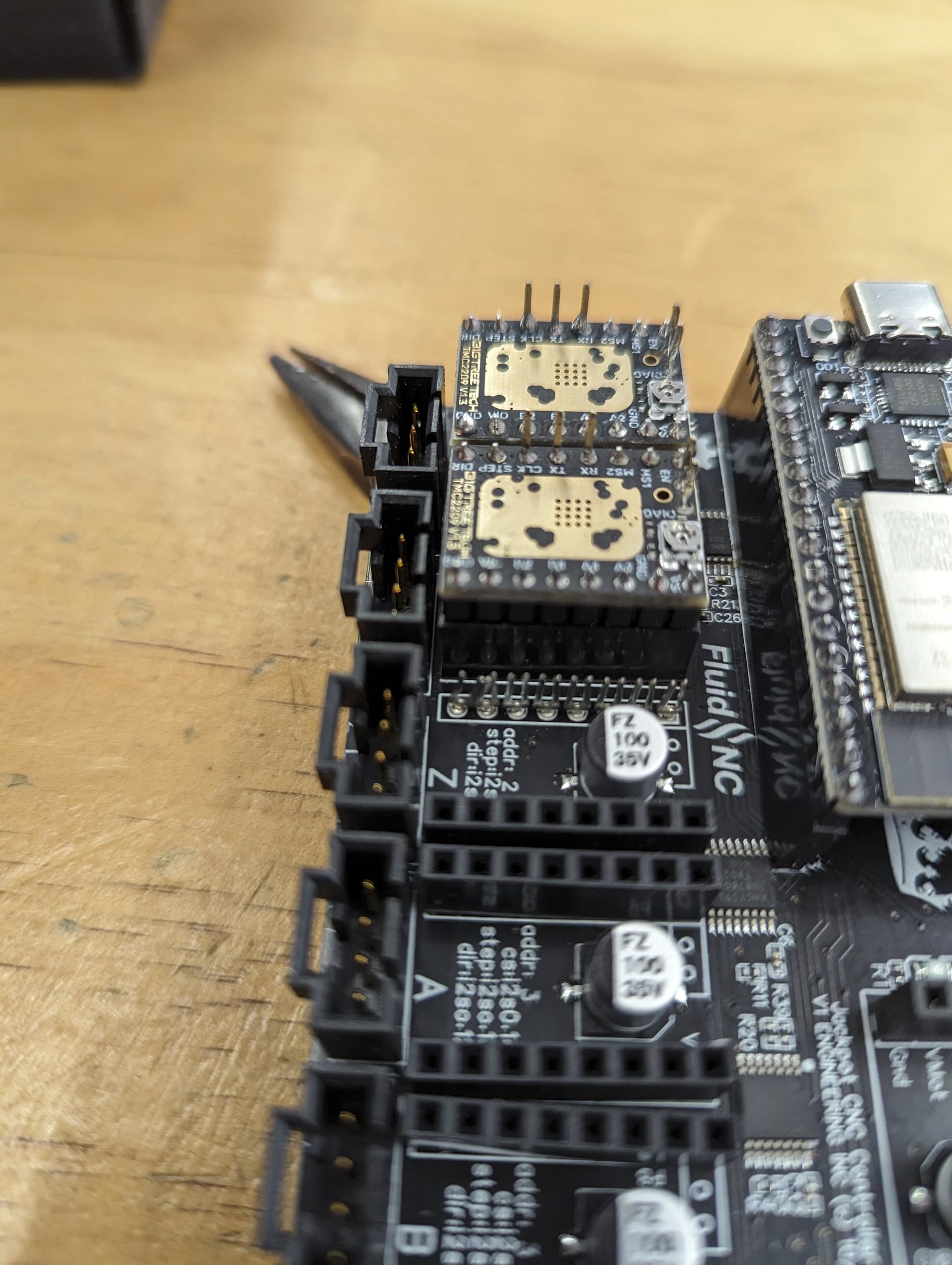
Otherwise, unless @vicious1 has any other ideas or steps, it does appear that you jackpot has an issue with the DIR connection to the A stepper driver. This could be bad solder work on the headers for the TMC driver, or with the IC that controls direction. Can you post a good hi-res picture of the solder on the A stepper socket headers, and another one of the two ICs just above the capacitor in the A posistion on your jackpot? (U3 is suspect to me)
3 Likes
A+ Customer service from V1 Engineering. Was sent a new board and returned the old board. New board works great, no issues. Easy swap.
6 Likes
vicious1
January 26, 2024, 11:07pm
13
I just took the time to look at the board. The Z driver was super hard to insert. Pulled off the header…
The Step and DIR pins were shorted. Bent them into place, all is good, no lost board!!!
This is the second time I have seen a bad header. In the newest version I changed the header company so hopefully this doesn’t happen anymore.
WIN!
4 Likes
That’s what was suspected from the troubleshooting- but we didnt guess it would be the header!
I hope the alternate supplier doesn’t have that issue.
vicious1
January 26, 2024, 11:46pm
15
Yeah pretty crazy to see. Really glad it did not pop anything else.
I thought about this some more…
With the header contacts shorted like that, the pin on the end almost certainly had to be bent/deformed while it was just a bare part. Which means the assembler who inserted it would have had to bend it back to get it to insert. This is also a manufacturing practices issue. Don’t assemble broken hardware.
2 Likes