I spent the vast majority of the evening configuring FluidNC on my TinyBee, and , while I think I got everything working (dual endstops and such…) I’m getting super-weird values for the steps_per_mm params
For X and Y, I’m a bit at loss here…
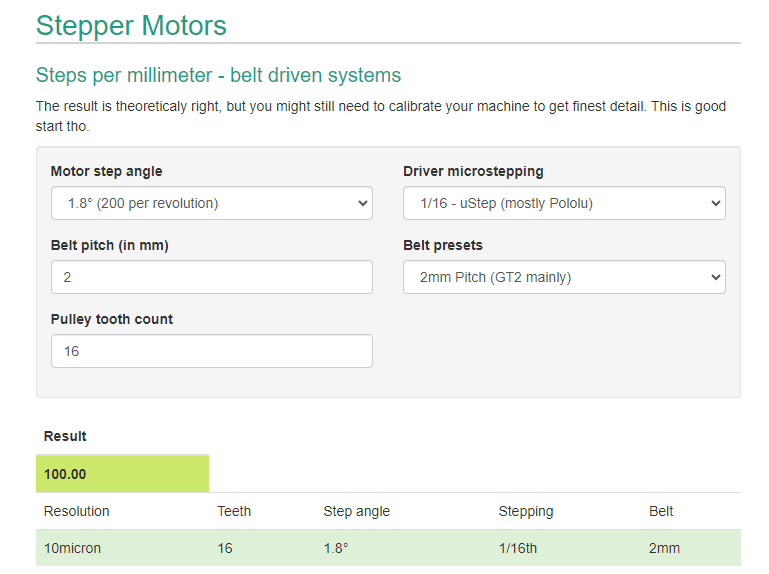
The calculator for 16teeth and GT2 belt says 100steps per mm, but this setting makes the machine overshoot quite a bit…
Adjusting the value by trial and error, I’m getting 98 for X (not bad…) and 62 for y (ugh?)
And why on earth would I get a different steps_per_mm value between x and y?
Finding the micro-stepping value is a bit complicated because the mks tinybee documentation is very poor… I used the default settings which should give me 1/16th
I’m using a mix of TMC2209 and (i believe) TMC2100 because 2 of my TMC2209 fried whiel adjusting vref…
X axis is driven by TMC2209
Y axis is driven by a mix of both
Z axis is driven by a mix of both
I didn’t notice a difference in travel between Y1 and Y2 or Z1 and Z2… but maybe I need to re-check this…
Maybe also check the pulleys?
I did order some 20t idlers for the LR3 but used the old pulleys from the LR2 for the motors
Maybe I’m just getting a bit tired after tweaking the whole thing for hours.
Did I miss something obvious?
Just reviewed my order for the LR2 back a few years ago… and they were 16T pinions alright…
Also I paid extra attention to re-use the same motors as X/Y with the pinion still attached when moving from LR2 to LR3…
So I think it’s not a problem with the teeth count…
I noticed the pinion is slightly mis-aligned tough, it sit lower than the idlers… I need to fix this…
Perhaps take a step back and check some other more basic things? Depending on how you’re controlling the thing to get the movement to measure, it may be that you have a ton of backlash somewhere, a pulley that’s spinning on the shaft or a miswired motor that’s skipping steps.
Perhaps take the belts off (or loosen them enough that it won’t drive) and make sure the number of rotations per movement is correct? If you’ve got a 16T pulley, you should be able to mark a spot on it, command a 32mm move and get it to rotate once. Do that to all the motors and make sure they’re rotating the correct way for each move.
If that looks right then put the belt back on and try to have it move the entire gantry. If that’s where problems show up then I’d guess that a pulley is slipping or something.
You could try moving it 100mm in one direction, seeing how far it moved, then moving it 100mm in the same direction and seeing if it moved the same amount each time. Does a 100mm square box come out twice as large as a 50mm square box, that kinda thing.
I’ve never tried a TMC2100. No idea if they could be the issue.
Messing up the microsteps settings would be off by 2x or 0.5x, at least.
A 20T pulley (they could have given you the wrong one) would be 80 steps/mm. So that looks closest.
If you had one motor on 1/8th and one on 1/16th, then you could get 68 steps/mm. Make sure you are making very large squares.
I am skeptical of the 98 too. How are you measuring it? Share some photos of your build. Make sure your grub screws are tight and the belt is staying in the track (not riding up onto the rim of the pulley).
Just took both Y motors apart, and seated the pulleys aligned to the idlers, and that was where my problem was…
Running straight and getting the right amount of movement from my step per mm settings now…
Also, I switched the driver to use two tmc2209 for both Y motors, and two TMC2210 for Z (waiting for new tmc220ç to arrive)