Hi, I recently swapped the board of my LRv3 from the SKR 1.4 Turbo+TFT35 to the Jackpot board.
At the beginning I had some issues due to the 24v power supply unit, but I resolved them by changing it with a better one.
After that I modified the max feeds and acceleration to match the ones I used on the SKR setup(the fw was V1 stock), but theres no way to reach them. Seems like the motors delivers a lot less power.
With the SKR the settings was:
XY 300mm/s and 600mm/s2 (I tried 400mm/s 800mm/s2 without problems)
Z 40mm/s and 80mm/s2.
With the Jackpot I cant go over 11000mm/s for XY and 30mm/s on Z.
And when traveling at those values even a light touch on the spindle will cause the motors to loose steps.
Also when milling the Z axis loose steps during rapids and tend to fall on his weight a lil’.
I swapped back to the SKR to be sure that all the hardware changes did not affect the performaces(new cables, connectors, power supply). And the answer is no, with the SKR the LR is great.
What stepper motor currents do you have set in your config.yaml?
What were the current settings on the SKR? Was it using TMC2209s or some other stepper?
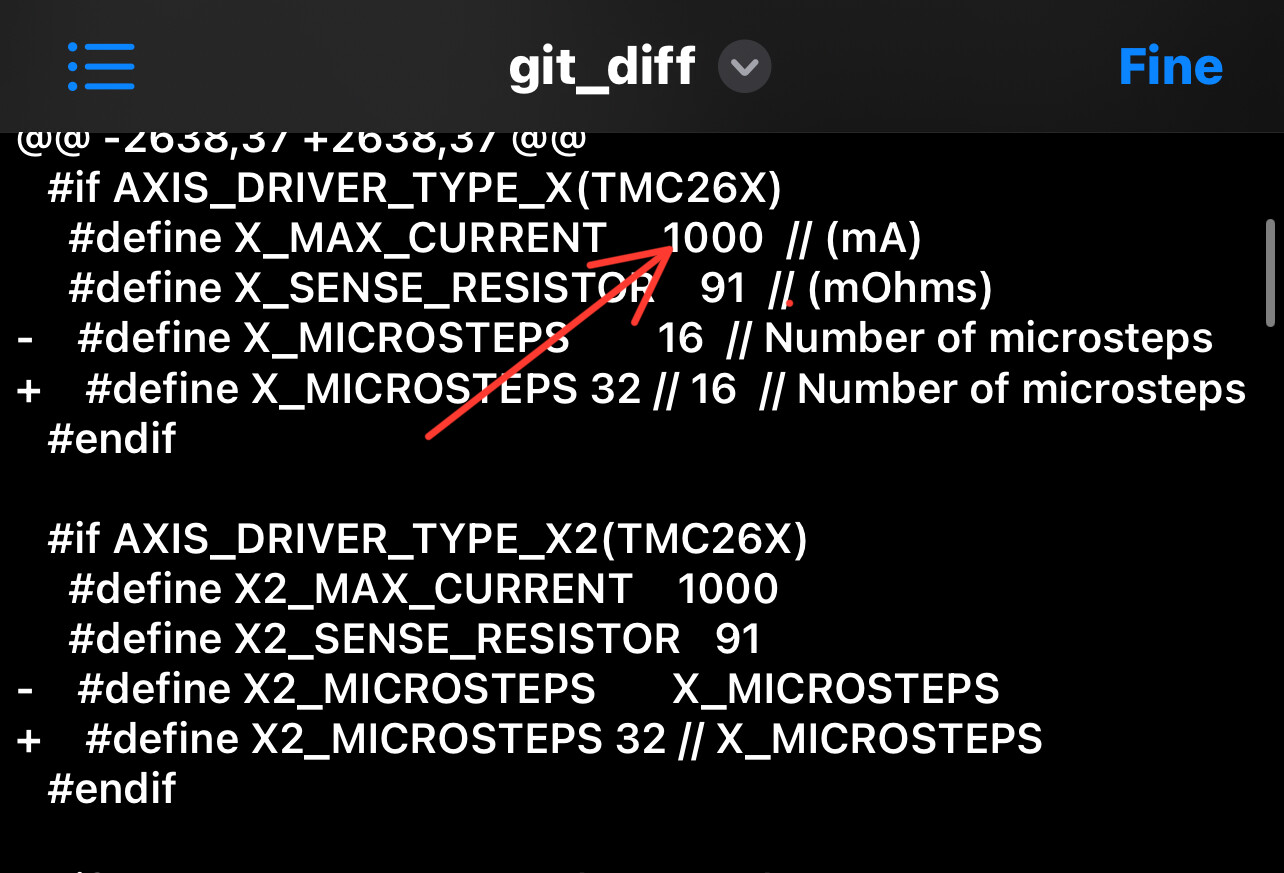
That is not the right setting in Marlin. It is X_CURRENT, etc. thise settings are for TMC26x, we use TMC2209. It is set to 900mA in the LR config.
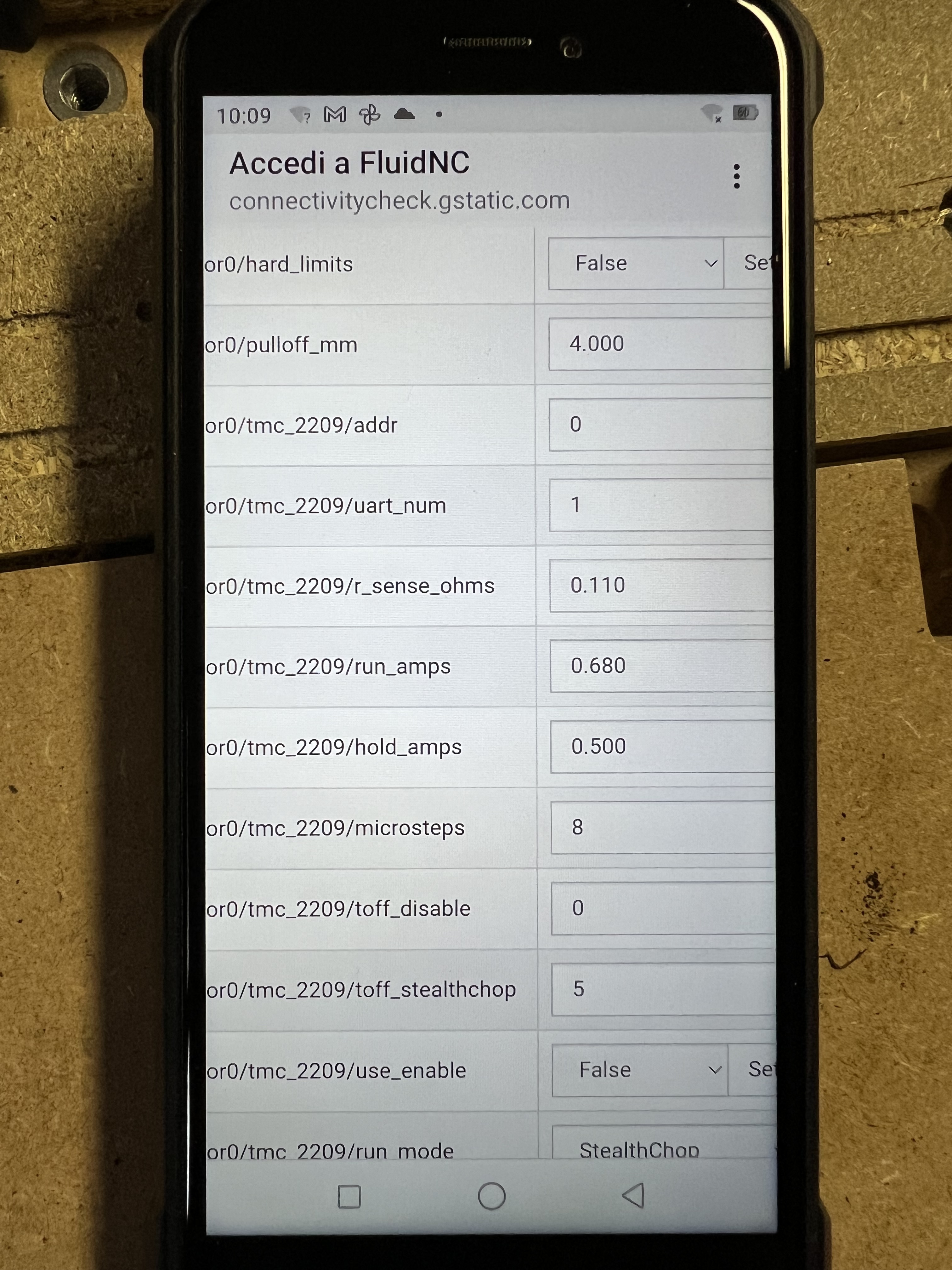
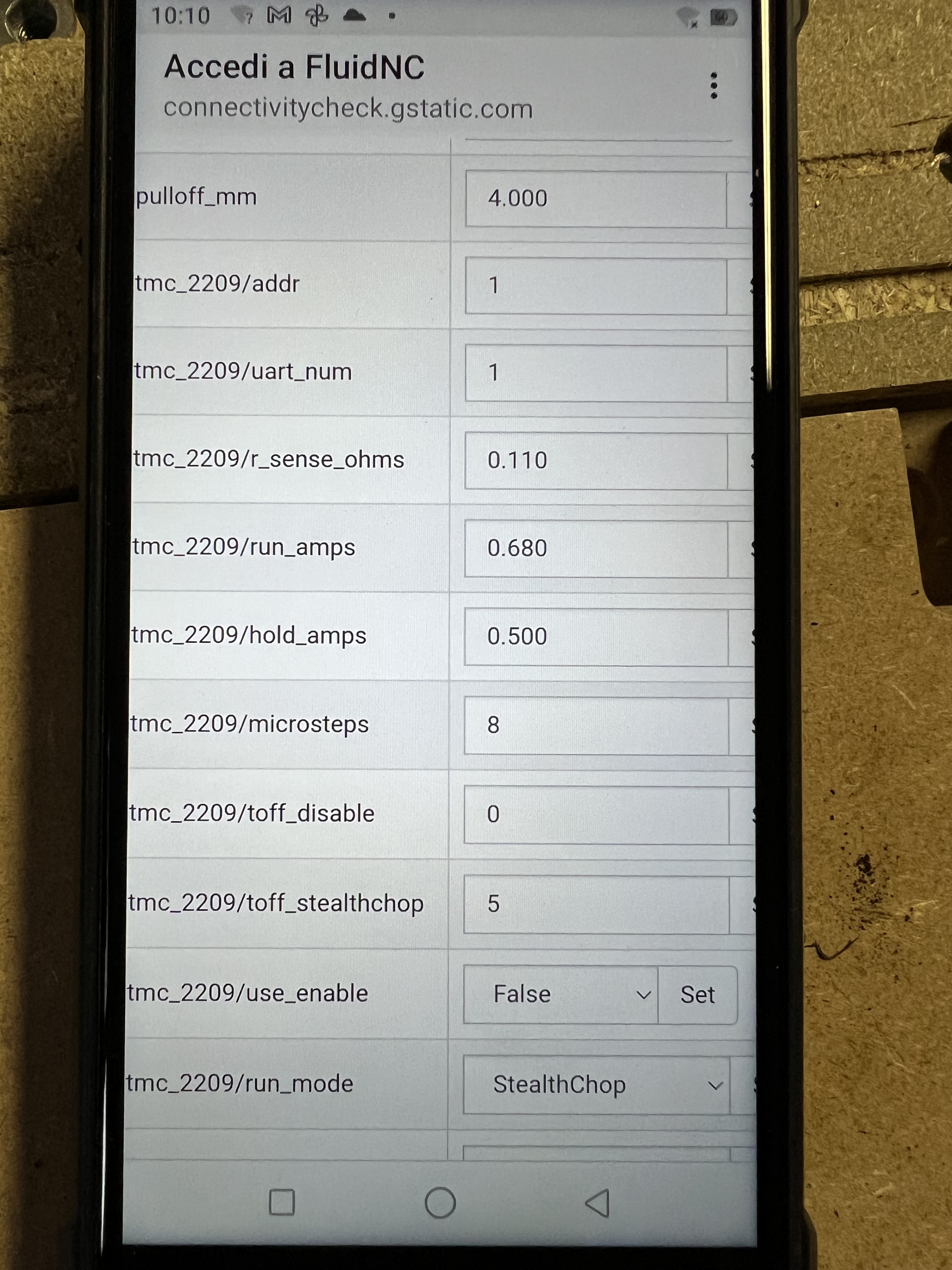
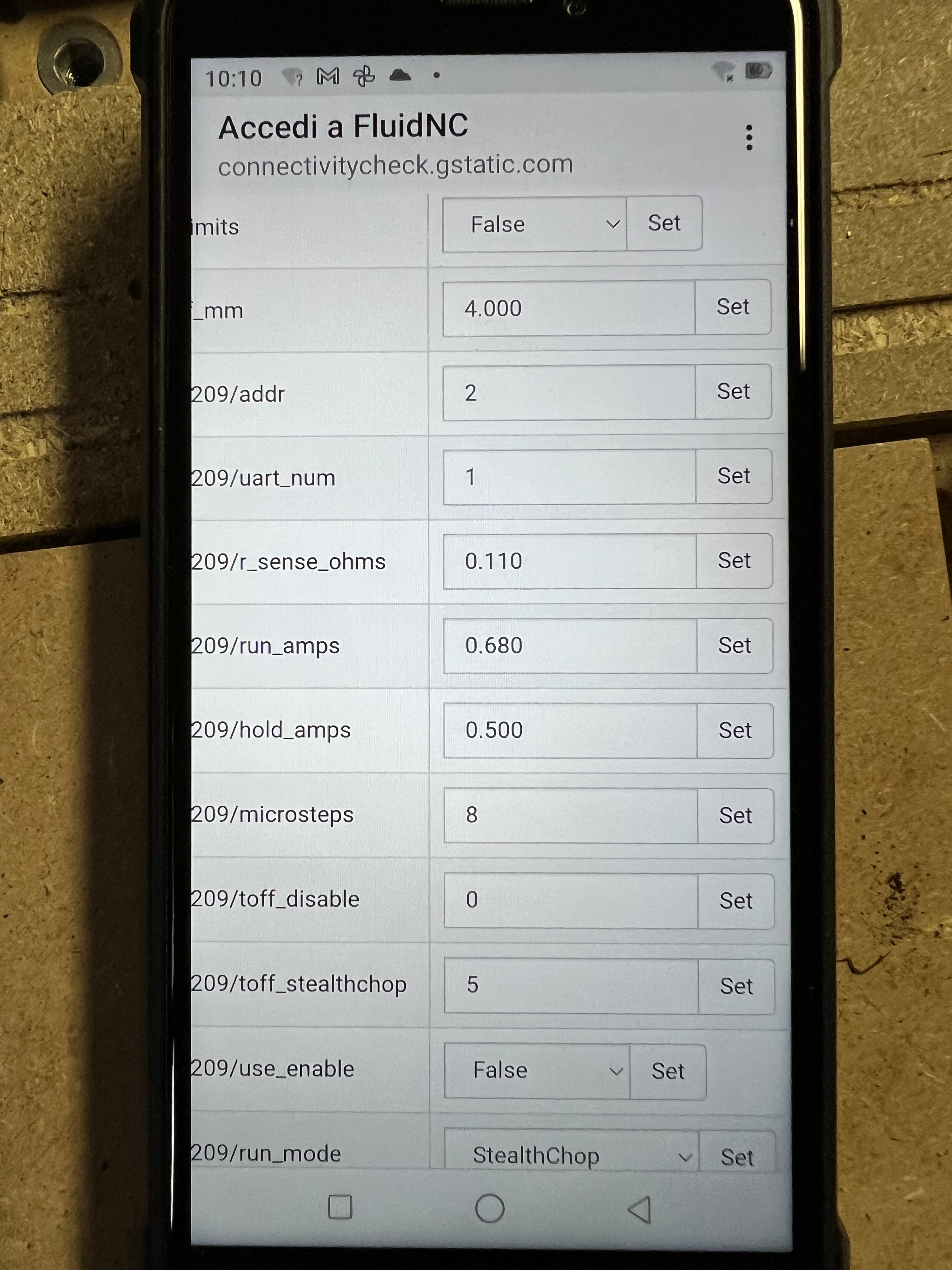
The jackpot configs have it set to 680. I am not sure why they are different, but I would just assume they are fine and adjust them however you like. They may have a different method to calculate what that amperage means. Or maybe Ryan has gotten more conservative with the jackpot.
A difference of 50mA can be a big difference. You want to make sure your drivers don’t overheat and your motors stay under 50C (or the mounts can get soft and deform).
Ok, I like so much FluidNC and all his features, but I have to reach the SKR performance…
I will try to increase the current limit and keep the temperature under control.
Would be nice If someone have already do this and can provide some reliable values.