Finally got around to giving this board a try and so far it has passed all the checks and successfully made some cuts on my Primo. A bit more tuning to go, but overall I think this is a great option. I’ve got the probe working using the TB input (with the help from some folks at FluidNC).
Config is mostly based on what @ relytjames has above and some things taken from fluidnc wiki.
board: MKS TinyBee V1.0 XXYYZ
name: MPCNC-PRIMO
kinematics:
Cartesian:
i2so:
bck_pin: gpio.25
data_pin: gpio.27
ws_pin: gpio.26
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 2
axes:
x:
steps_per_mm: 100.000
max_rate_mm_per_min: 8000.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 600.000
soft_limits: true
homing:
cycle: 0
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.33:high
hard_limits: true
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.1
direction_pin: I2SO.2
disable_pin: I2SO.0
# use E0 driver for 2nd X axis motor
motor1:
limit_neg_pin: gpio.22:high
hard_limits: true
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.10
direction_pin: I2SO.11
disable_pin: I2SO.9
y:
steps_per_mm: 100.000
max_rate_mm_per_min: 8000.000
acceleration_mm_per_sec2: 70.000
max_travel_mm: 440.000
soft_limits: true
homing:
cycle: 0
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.32:high
hard_limits: true
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.4
direction_pin: I2SO.5
disable_pin: I2SO.3
# use E1 driver for 2nd Y axis motor
motor1:
limit_neg_pin: gpio.35:high
hard_limits: true
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.13
direction_pin: I2SO.14
disable_pin: I2SO.12
z:
steps_per_mm: 400.000
max_rate_mm_per_min: 8000.000
acceleration_mm_per_sec2: 60.000
max_travel_mm: 80.000
soft_limits: false
homing:
cycle: 0
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
pulloff_mm: 3.000
stepstick:
step_pin: I2SO.7
direction_pin: I2SO.8
disable_pin: I2SO.6
relay:
direction_pin: NO_PIN
output_pin: i2so.17
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
spinup_ms: 0
spindown_ms: 0
tool_num: 0
speed_map: 0=0.000% 0=100.000% 1=100.000%
off_on_alarm: false
probe:
# this is the TB input
pin: gpio.39:low
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
start:
must_home: false
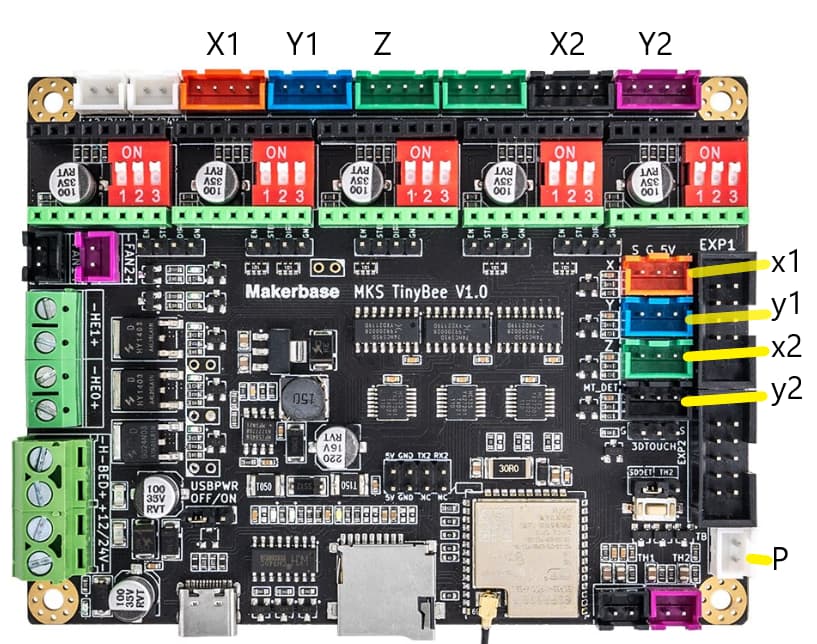
Motors are X1, Y1, X2, Y2, Z.
Limit switches are x1, y1, x2, y2 and use the S and G pins (left two pins).
P is the z probe.
The spindle relay is still untested.