Hi there!
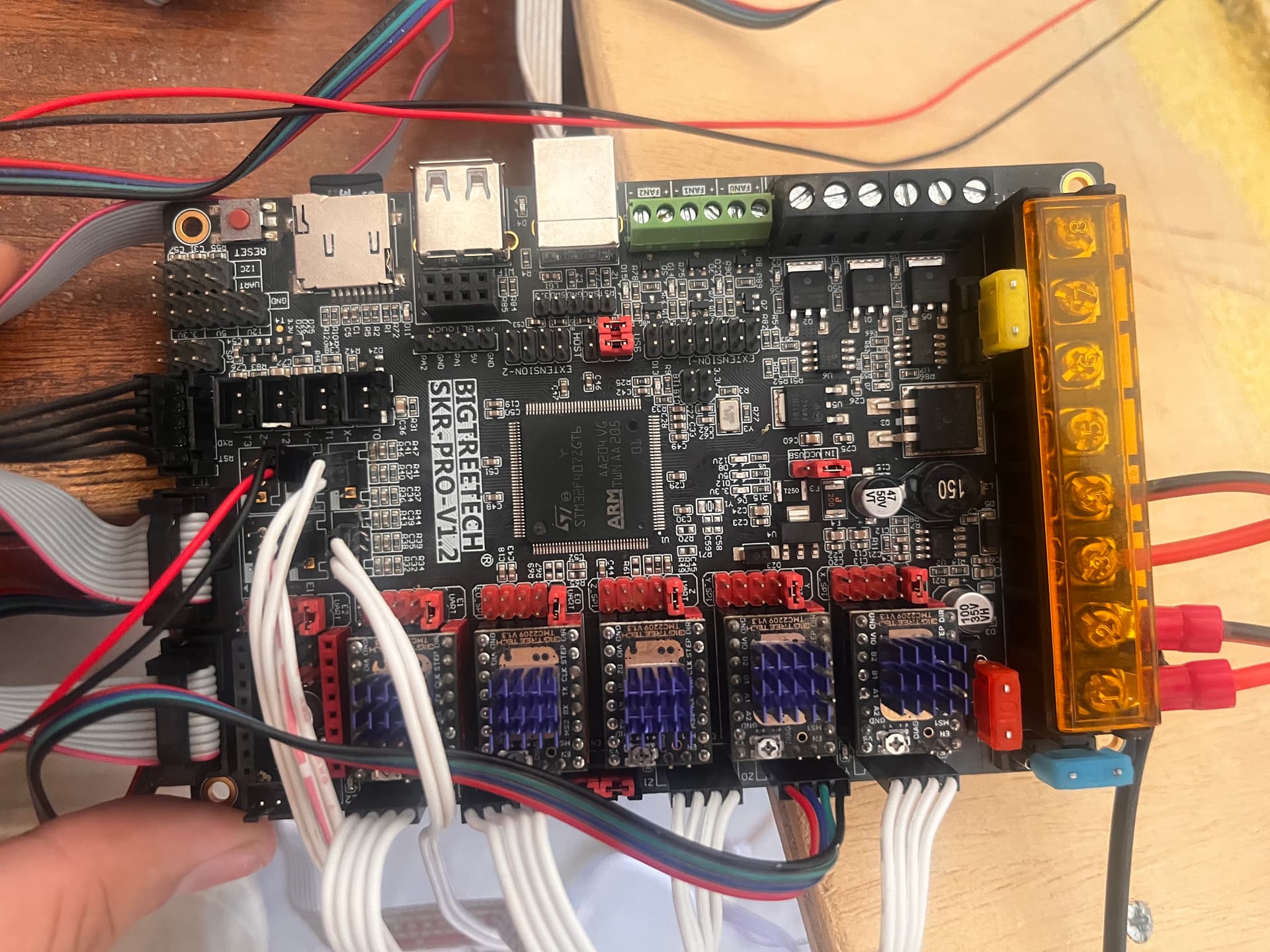
I think we are in the good direction, now I have een able to move the CNC with my program, but there are still some motors that are not working. I send you the results of both tests (with and without the wires attached)
Right now, all 6 LEDS (X, Y, Z1, E0, E1, E2) are on.
21:24:26.713 : No start signal detected - forcing start
21:24:26.807 : FIRMWARE_NAME:Marlin 515D 2.1.1 (Sep 25 2022 17:41:33) SOURCE_CODE_URL:github.com/MarlinFirmware/Marlin PROTOCOL_VERSION:1.0 MACHINE_TYPE:V1CNC 515D EXTRUDER_COUNT:0 UUID:cede2a2f-41a2-4748-9b12-c55c62f367ff
21:24:26.807 : Cap:SERIAL_XON_XOFF:0
21:24:26.807 : Cap:BINARY_FILE_TRANSFER:0
21:24:26.807 : Cap:EEPROM:1
21:24:26.807 : Cap:VOLUMETRIC:0
21:24:26.807 : Cap:AUTOREPORT_POS:1
21:24:26.807 : Cap:AUTOREPORT_TEMP:0
21:24:26.807 : Cap:PROGRESS:0
21:24:26.807 : Cap:PRINT_JOB:1
21:24:26.807 : Cap:AUTOLEVEL:0
21:24:26.807 : Cap:RUNOUT:0
21:24:26.807 : Cap:Z_PROBE:0
21:24:26.807 : Cap:LEVELING_DATA:0
21:24:26.807 : Cap:BUILD_PERCENT:0
21:24:26.807 : Cap:SOFTWARE_POWER:0
21:24:26.807 : Cap:TOGGLE_LIGHTS:0
21:24:26.807 : Cap:CASE_LIGHT_BRIGHTNESS:0
21:24:26.807 : Cap:EMERGENCY_PARSER:1
21:24:26.807 : Cap:HOST_ACTION_COMMANDS:1
21:24:26.807 : Cap:PROMPT_SUPPORT:1
21:24:26.807 : Cap:SDCARD:1
21:24:26.807 : Cap:MULTI_VOLUME:0
21:24:26.807 : Cap:REPEAT:0
21:24:26.807 : Cap:SD_WRITE:1
21:24:26.807 : Cap:AUTOREPORT_SD_STATUS:1
21:24:26.807 : Cap:LONG_FILENAME:0
21:24:26.807 : Cap:LFN_WRITE:0
21:24:26.807 : Cap:CUSTOM_FIRMWARE_UPLOAD:0
21:24:26.807 : Cap:EXTENDED_M20:0
21:24:26.807 : Cap:THERMAL_PROTECTION:1
21:24:26.807 : Cap:MOTION_MODES:1
21:24:26.807 : Cap:ARCS:1
21:24:26.807 : Cap:BABYSTEPPING:1
21:24:26.807 : Cap:CHAMBER_TEMPERATURE:0
21:24:26.807 : Cap:COOLER_TEMPERATURE:0
21:24:26.807 : Cap:MEATPACK:0
21:24:26.807 : Cap:CONFIG_EXPORT:0
21:24:26.807 : area:{full:{min:{x:0.0000,y:0.0000,z:0.0000},max:{x:1220.0000,y:2440.0000,z:200.0000}},work:{min:{x:0.0000,y:0.0000,z:0.0000},max:{x:1220.0000,y:2440.0000,z:200.0000}}}
21:24:26.885 : X:0.0000 Y:0.0000 Z:0.0000 Count X:0 Y:0 Z:0
21:24:26.885 : echo:Unknown command: “M221 S100”
21:24:26.885 : echo:DEBUG:INFO,ERRORS
21:24:26.885 : echo:No media
21:24:26.885 : echo:Unknown command: “M80”
21:24:26.885 : echo:DEBUG:INFO,ERRORS
21:33:57.947 : Preferred name from C:\Users\Fej\Desktop\CNC\FYA.gcode to FYA
21:34:52.358 : Communication timeout - reset send buffer block
21:35:39.660 : Un périphérique attaché au système ne fonctionne pas correctement.
21:35:39.660 :
21:36:06.712 : No start signal detected - forcing start
21:36:06.790 : FIRMWARE_NAME:Marlin 515D 2.1.1 (Sep 25 2022 17:41:33) SOURCE_CODE_URL:github.com/MarlinFirmware/Marlin PROTOCOL_VERSION:1.0 MACHINE_TYPE:V1CNC 515D EXTRUDER_COUNT:0 UUID:cede2a2f-41a2-4748-9b12-c55c62f367ff
21:36:06.790 : Cap:SERIAL_XON_XOFF:0
21:36:06.790 : Cap:BINARY_FILE_TRANSFER:0
21:36:06.790 : Cap:EEPROM:1
21:36:06.790 : Cap:VOLUMETRIC:0
21:36:06.790 : Cap:AUTOREPORT_POS:1
21:36:06.790 : Cap:AUTOREPORT_TEMP:0
21:36:06.790 : Cap:PROGRESS:0
21:36:06.790 : Cap:PRINT_JOB:1
21:36:06.790 : Cap:AUTOLEVEL:0
21:36:06.790 : Cap:RUNOUT:0
21:36:06.790 : Cap:Z_PROBE:0
21:36:06.790 : Cap:LEVELING_DATA:0
21:36:06.790 : Cap:BUILD_PERCENT:0
21:36:06.790 : Cap:SOFTWARE_POWER:0
21:36:06.790 : Cap:TOGGLE_LIGHTS:0
21:36:06.790 : Cap:CASE_LIGHT_BRIGHTNESS:0
21:36:06.790 : Cap:EMERGENCY_PARSER:1
21:36:06.790 : Cap:HOST_ACTION_COMMANDS:1
21:36:06.790 : Cap:PROMPT_SUPPORT:1
21:36:06.790 : Cap:SDCARD:1
21:36:06.790 : Cap:MULTI_VOLUME:0
21:36:06.790 : Cap:REPEAT:0
21:36:06.790 : Cap:SD_WRITE:1
21:36:06.790 : Cap:AUTOREPORT_SD_STATUS:1
21:36:06.790 : Cap:LONG_FILENAME:0
21:36:06.790 : Cap:LFN_WRITE:0
21:36:06.790 : Cap:CUSTOM_FIRMWARE_UPLOAD:0
21:36:06.790 : Cap:EXTENDED_M20:0
21:36:06.790 : Cap:THERMAL_PROTECTION:1
21:36:06.790 : Cap:MOTION_MODES:1
21:36:06.790 : Cap:ARCS:1
21:36:06.790 : Cap:BABYSTEPPING:1
21:36:06.790 : Cap:CHAMBER_TEMPERATURE:0
21:36:06.790 : Cap:COOLER_TEMPERATURE:0
21:36:06.790 : Cap:MEATPACK:0
21:36:06.790 : Cap:CONFIG_EXPORT:0
21:36:06.790 : area:{full:{min:{x:0.0000,y:0.0000,z:0.0000},max:{x:1220.0000,y:2440.0000,z:200.0000}},work:{min:{x:0.0000,y:0.0000,z:0.0000},max:{x:1220.0000,y:2440.0000,z:200.0000}}}
21:36:06.790 : X:0.0000 Y:0.0000 Z:0.0000 Count X:0 Y:0 Z:0
21:36:06.790 : echo:Unknown command: “M221 S100”
21:36:06.790 : echo:DEBUG:INFO,ERRORS
21:36:06.790 : echo:No media
21:36:06.790 : echo:Unknown command: “M80”
21:36:06.790 : echo:DEBUG:INFO,ERRORS
21:36:24.429 : echo:; Linear Units:
21:36:24.429 : echo: G21 ; (mm)
21:36:24.429 : echo:; Temperature Units:
21:36:24.429 : echo: M149 C ; Units in Celsius
21:36:24.429 : echo:; Steps per unit:
21:36:24.429 : echo: M92 X100.0000 Y100.0000 Z400.0000
21:36:24.429 : echo:; Max feedrates (units/s):
21:36:24.429 : echo: M203 X50.0000 Y50.0000 Z15.0000
21:36:24.429 : echo:; Max Acceleration (units/s2):
21:36:24.429 : echo: M201 X180.0000 Y180.0000 Z80.0000
21:36:24.429 : echo:; Acceleration (units/s2) (P R T):
21:36:24.429 : echo: M204 P180.0000 R3000.0000 T180.0000
21:36:24.429 : echo:; Advanced (B<min_segment_time_us> S<min_feedrate> T<min_travel_feedrate> J<junc_dev>):
21:36:24.429 : echo: M205 B20000.0000 S0.0000 T0.0000 J0.0400
21:36:24.429 : echo:; Home offset:
21:36:24.429 : echo: M206 X0.0000 Y0.0000 Z0.0000
21:36:24.429 : echo:; Endstop adjustment:
21:36:24.429 : echo: M666 X0.0000
21:36:24.429 : Y0.0000
21:36:24.429 : echo:; Stepper driver current:
21:36:24.429 : echo: M906 X900 Y900 Z900
21:36:24.429 : echo: M906 I1 X900 Y900
21:36:24.429 : echo:; Driver stepping mode:
21:36:45.287 : X X2 Y Y2 Z
21:36:45.287 : Address 0 0 0 0 0
21:36:45.412 : Enabled false false false false false
21:36:45.412 : Set current 900 900 900 900 900
21:36:45.490 : RMS current 1602 887 1602 887 1602
21:36:45.569 : MAX current 2259 1251 2259 1251 2259
21:36:45.569 : Run current 28/31 28/31 28/31 28/31 28/31
21:36:45.569 : Hold current 22/31 22/31 22/31 22/31 22/31
21:36:45.647 : CS actual 0/31 22/31 0/31 22/31 0/31
21:36:45.647 : PWM scale
21:36:45.725 : vsense 0=.325 1=.18 0=.325 1=.18 0=.325
21:36:45.803 : stealthChop false false false false false
21:36:45.881 : msteps 256 16 256 16 256
21:36:45.943 : interp false true false true false
21:36:46.022 : tstep 0 max 0 max 0
21:36:46.022 : PWM thresh.
21:36:46.022 : [mm/s]
21:36:46.100 : OT prewarn false false false false false
21:36:46.100 : triggered
21:36:46.100 : OTP false false false false false
21:36:46.178 : pwm scale sum 0 25 0 25 0
21:36:46.256 : pwm scale auto 0 0 0 0 0
21:36:46.334 : pwm offset auto 0 36 0 36 0
21:36:46.412 : pwm grad auto 0 14 0 14 0
21:36:46.475 : off time 0 3 0 3 0
21:36:46.553 : blank time 16 24 16 24 16
21:36:46.553 : hysteresis
21:36:46.631 : -end -3 -1 -3 -1 -3
21:36:46.709 : -start 1 1 1 1 1
21:36:46.709 : Stallguard thrs 0 0 0 0 0
21:36:46.787 : uStep count 0 56 0 56 0
21:36:46.787 : DRVSTATUS X X2 Y Y2 Z
21:36:46.865 : sg_result 0 0 0 0 0
21:36:46.943 : stst * * *
21:36:47.006 : olb * *
21:36:47.084 : ola * *
21:36:47.162 : s2gb
21:36:47.240 : s2ga
21:36:47.318 : otpw
21:36:47.397 : ot
21:36:47.475 : 157C
21:36:47.553 : 150C
21:36:47.615 : 143C
21:36:47.693 : 120C
21:36:47.771 : s2vsa
21:36:47.850 : s2vsb
21:36:47.850 : Driver registers:
21:36:47.865 : X 0x00:00:00:00 Bad response!
21:36:47.881 : X2 0x80:16:00:C0
21:36:47.896 : Y 0x00:00:00:00 Bad response!
21:36:47.912 : Y2 0x80:16:00:C0
21:36:47.928 : Z 0x00:00:00:00 Bad response!
21:36:47.943 : Testing X connection… Error: All LOW
21:36:47.959 : Testing X2 connection… OK
21:36:47.975 : Testing Y connection… Error: All LOW
21:36:47.975 : Testing Y2 connection… OK
21:36:48.006 : Testing Z connection… Error: All LOW
21:37:32.503 : X X2 Y Y2 Z
21:37:32.503 : Address 0 0 0 0 0
21:37:32.628 : Enabled false false false false false
21:37:32.628 : Set current 900 900 900 900 900
21:37:32.706 : RMS current 1602 887 1602 887 1602
21:37:32.784 : MAX current 2259 1251 2259 1251 2259
21:37:32.784 : Run current 28/31 28/31 28/31 28/31 28/31
21:37:32.784 : Hold current 22/31 22/31 22/31 22/31 22/31
21:37:32.862 : CS actual 0/31 22/31 0/31 22/31 0/31
21:37:32.862 : PWM scale
21:37:32.940 : vsense 0=.325 1=.18 0=.325 1=.18 0=.325
21:37:33.018 : stealthChop false false false false false
21:37:33.081 : msteps 256 16 256 16 256
21:37:33.159 : interp false true false true false
21:37:33.237 : tstep 0 max 0 max 0
21:37:33.237 : PWM thresh.
21:37:33.237 : [mm/s]
21:37:33.315 : OT prewarn false false false false false
21:37:33.315 : triggered
21:37:33.315 : OTP false false false false false
21:37:33.393 : pwm scale sum 0 25 0 25 0
21:37:33.471 : pwm scale auto 0 0 0 0 0
21:37:33.550 : pwm offset auto 0 36 0 36 0
21:37:33.628 : pwm grad auto 0 14 0 14 0
21:37:33.690 : off time 0 3 0 3 0
21:37:33.768 : blank time 16 24 16 24 16
21:37:33.768 : hysteresis
21:37:33.846 : -end -3 -1 -3 -1 -3
21:37:33.925 : -start 1 1 1 1 1
21:37:33.925 : Stallguard thrs 0 0 0 0 0
21:37:34.003 : uStep count 0 56 0 56 0
21:37:34.003 : DRVSTATUS X X2 Y Y2 Z
21:37:34.081 : sg_result 0 0 0 0 0
21:37:34.159 : stst * * *
21:37:34.237 : olb * *
21:37:34.300 : ola * *
21:37:34.378 : s2gb
21:37:34.456 : s2ga
21:37:34.534 : otpw
21:37:34.612 : ot
21:37:34.690 : 157C
21:37:34.768 : 150C
21:37:34.831 : 143C
21:37:34.909 : 120C
21:37:34.987 : s2vsa
21:37:35.065 : s2vsb
21:37:35.065 : Driver registers:
21:37:35.081 : X 0x00:00:00:00 Bad response!
21:37:35.096 : X2 0x80:16:00:C0
21:37:35.112 : Y 0x00:00:00:00 Bad response!
21:37:35.128 : Y2 0x80:16:00:C0
21:37:35.143 : Z 0x00:00:00:00 Bad response!
21:37:35.159 : Testing X connection… Error: All LOW
21:37:35.174 : Testing X2 connection… OK
21:37:35.190 : Testing Y connection… Error: All LOW
21:37:35.190 : Testing Y2 connection… OK
21:37:35.221 : Testing Z connection… Error: All LOW
21:40:06.546 : No start signal detected - forcing start
21:40:06.609 : FIRMWARE_NAME:Marlin 515D 2.1.1 (Sep 25 2022 17:41:33) SOURCE_CODE_URL:github.com/MarlinFirmware/Marlin PROTOCOL_VERSION:1.0 MACHINE_TYPE:V1CNC 515D EXTRUDER_COUNT:0 UUID:cede2a2f-41a2-4748-9b12-c55c62f367ff
21:40:06.609 : Cap:SERIAL_XON_XOFF:0
21:40:06.609 : Cap:BINARY_FILE_TRANSFER:0
21:40:06.609 : Cap:EEPROM:1
21:40:06.609 : Cap:VOLUMETRIC:0
21:40:06.609 : Cap:AUTOREPORT_POS:1
21:40:06.609 : Cap:AUTOREPORT_TEMP:0
21:40:06.609 : Cap:PROGRESS:0
21:40:06.609 : Cap:PRINT_JOB:1
21:40:06.609 : Cap:AUTOLEVEL:0
21:40:06.609 : Cap:RUNOUT:0
21:40:06.609 : Cap:Z_PROBE:0
21:40:06.609 : Cap:LEVELING_DATA:0
21:40:06.609 : Cap:BUILD_PERCENT:0
21:40:06.609 : Cap:SOFTWARE_POWER:0
21:40:06.609 : Cap:TOGGLE_LIGHTS:0
21:40:06.609 : Cap:CASE_LIGHT_BRIGHTNESS:0
21:40:06.609 : Cap:EMERGENCY_PARSER:1
21:40:06.609 : Cap:HOST_ACTION_COMMANDS:1
21:40:06.609 : Cap:PROMPT_SUPPORT:1
21:40:06.609 : Cap:SDCARD:1
21:40:06.609 : Cap:MULTI_VOLUME:0
21:40:06.609 : Cap:REPEAT:0
21:40:06.609 : Cap:SD_WRITE:1
21:40:06.609 : Cap:AUTOREPORT_SD_STATUS:1
21:40:06.609 : Cap:LONG_FILENAME:0
21:40:06.609 : Cap:LFN_WRITE:0
21:40:06.609 : Cap:CUSTOM_FIRMWARE_UPLOAD:0
21:40:06.609 : Cap:EXTENDED_M20:0
21:40:06.609 : Cap:THERMAL_PROTECTION:1
21:40:06.609 : Cap:MOTION_MODES:1
21:40:06.609 : Cap:ARCS:1
21:40:06.609 : Cap:BABYSTEPPING:1
21:40:06.609 : Cap:CHAMBER_TEMPERATURE:0
21:40:06.609 : Cap:COOLER_TEMPERATURE:0
21:40:06.609 : Cap:MEATPACK:0
21:40:06.609 : Cap:CONFIG_EXPORT:0
21:40:06.609 : area:{full:{min:{x:0.0000,y:0.0000,z:0.0000},max:{x:1220.0000,y:2440.0000,z:200.0000}},work:{min:{x:0.0000,y:0.0000,z:0.0000},max:{x:1220.0000,y:2440.0000,z:200.0000}}}
21:40:06.609 : X:0.0000 Y:0.0000 Z:0.0000 Count X:0 Y:0 Z:0
21:40:06.609 : echo:Unknown command: “M221 S100”
21:40:06.640 : echo:DEBUG:INFO,ERRORS
21:40:06.640 : echo:No media
21:40:06.640 : echo:Unknown command: “M80”
21:40:06.656 : echo:DEBUG:INFO,ERRORS
21:40:24.795 : echo:; Linear Units:
21:40:24.795 : echo: G21 ; (mm)
21:40:24.795 : echo:; Temperature Units:
21:40:24.795 : echo: M149 C ; Units in Celsius
21:40:24.795 : echo:; Steps per unit:
21:40:24.795 : echo: M92 X100.0000 Y100.0000 Z400.0000
21:40:24.795 : echo:; Max feedrates (units/s):
21:40:24.795 : echo: M203 X50.0000 Y50.0000 Z15.0000
21:40:24.795 : echo:; Max Acceleration (units/s2):
21:40:24.795 : echo: M201 X180.0000 Y180.0000 Z80.0000
21:40:24.795 : echo:; Acceleration (units/s2) (P R T):
21:40:24.795 : echo: M204 P180.0000 R3000.0000 T180.0000
21:40:24.795 : echo:; Advanced (B<min_segment_time_us> S<min_feedrate> T<min_travel_feedrate> J<junc_dev>):
21:40:24.795 : echo: M205 B20000.0000 S0.0000 T0.0000 J0.0400
21:40:24.795 : echo:; Home offset:
21:40:24.795 : echo: M206 X0.0000 Y0.0000 Z0.0000
21:40:24.795 : echo:; Endstop adjustment:
21:40:24.795 : echo: M666 X0.0000
21:40:24.795 : Y0.0000
21:40:24.795 : echo:; Stepper driver current:
21:40:24.795 : echo: M906 X900 Y900 Z900
21:40:24.795 : echo: M906 I1 X900 Y900
21:40:24.795 : echo:; Driver stepping mode:
21:40:47.168 : X X2 Y Y2 Z
21:40:47.168 : Address 0 0 0 0 0
21:40:47.293 : Enabled false false false false false
21:40:47.293 : Set current 900 900 900 900 900
21:40:47.372 : RMS current 1602 887 1602 887 1602
21:40:47.450 : MAX current 2259 1251 2259 1251 2259
21:40:47.450 : Run current 28/31 28/31 28/31 28/31 28/31
21:40:47.450 : Hold current 22/31 22/31 22/31 22/31 22/31
21:40:47.528 : CS actual 0/31 22/31 0/31 22/31 0/31
21:40:47.528 : PWM scale
21:40:47.606 : vsense 0=.325 1=.18 0=.325 1=.18 0=.325
21:40:47.684 : stealthChop false false false false false
21:40:47.747 : msteps 256 16 256 16 256
21:40:47.825 : interp false true false true false
21:40:47.903 : tstep 0 max 0 max 0
21:40:47.903 : PWM thresh.
21:40:47.903 : [mm/s]
21:40:47.981 : OT prewarn false false false false false
21:40:47.981 : triggered
21:40:47.981 : OTP false false false false false
21:40:48.059 : pwm scale sum 0 25 0 25 0
21:40:48.137 : pwm scale auto 0 0 0 0 0
21:40:48.215 : pwm offset auto 0 36 0 36 0
21:40:48.293 : pwm grad auto 0 14 0 14 0
21:40:48.356 : off time 0 3 0 3 0
21:40:48.434 : blank time 16 24 16 24 16
21:40:48.434 : hysteresis
21:40:48.512 : -end -3 -1 -3 -1 -3
21:40:48.590 : -start 1 1 1 1 1
21:40:48.590 : Stallguard thrs 0 0 0 0 0
21:40:48.668 : uStep count 0 56 0 56 0
21:40:48.668 : DRVSTATUS X X2 Y Y2 Z
21:40:48.746 : sg_result 0 0 0 0 0
21:40:48.825 : stst * * *
21:40:48.887 : olb * *
21:40:48.965 : ola * *
21:40:49.043 : s2gb
21:40:49.121 : s2ga
21:40:49.200 : otpw
21:40:49.278 : ot
21:40:49.356 : 157C
21:40:49.434 : 150C
21:40:49.496 : 143C
21:40:49.575 : 120C
21:40:49.653 : s2vsa
21:40:49.731 : s2vsb
21:40:49.731 : Driver registers:
21:40:49.746 : X 0x00:00:00:00 Bad response!
21:40:49.762 : X2 0x80:16:00:C0
21:40:49.778 : Y 0x00:00:00:00 Bad response!
21:40:49.793 : Y2 0x80:16:00:C0
21:40:49.809 : Z 0x00:00:00:00 Bad response!
21:40:49.825 : Testing X connection… Error: All LOW
21:40:49.840 : Testing X2 connection… OK
21:40:49.856 : Testing Y connection… Error: All LOW
21:40:49.856 : Testing Y2 connection… OK
21:40:49.887 : Testing Z connection… Error: All LOW
21:41:20.166 : Reporting endstop status
21:41:20.166 : x_min: TRIGGERED
21:41:20.166 : x2_min: TRIGGERED
21:41:20.166 : y_min: TRIGGERED
21:41:20.166 : y2_min: TRIGGERED
21:41:20.166 : z_min: open