Dear Community,
I “inherited” a working LowRider as a form of uni project. I was able to figure out most problems by browsing the forums, but I am kinda at a dead end with the CYD.
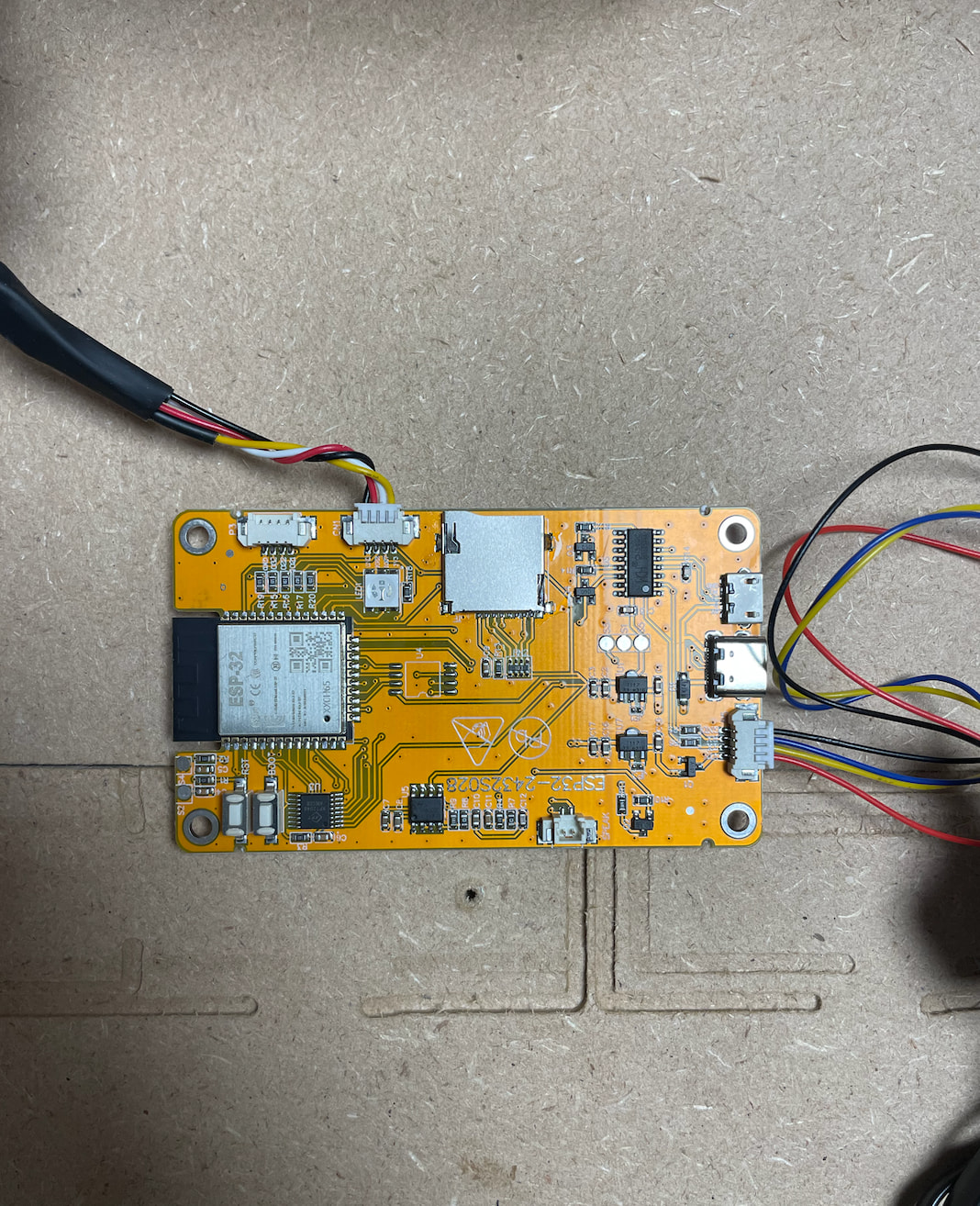
The CYD powers up fine and the wheel does function to scroll through the menu. By the title you most likely can already guess that it does not connect to the Jackpot3 tho. I added the usual bits to the config, switched txd_pin and rxd_pin around in SW and HW - but no luck.
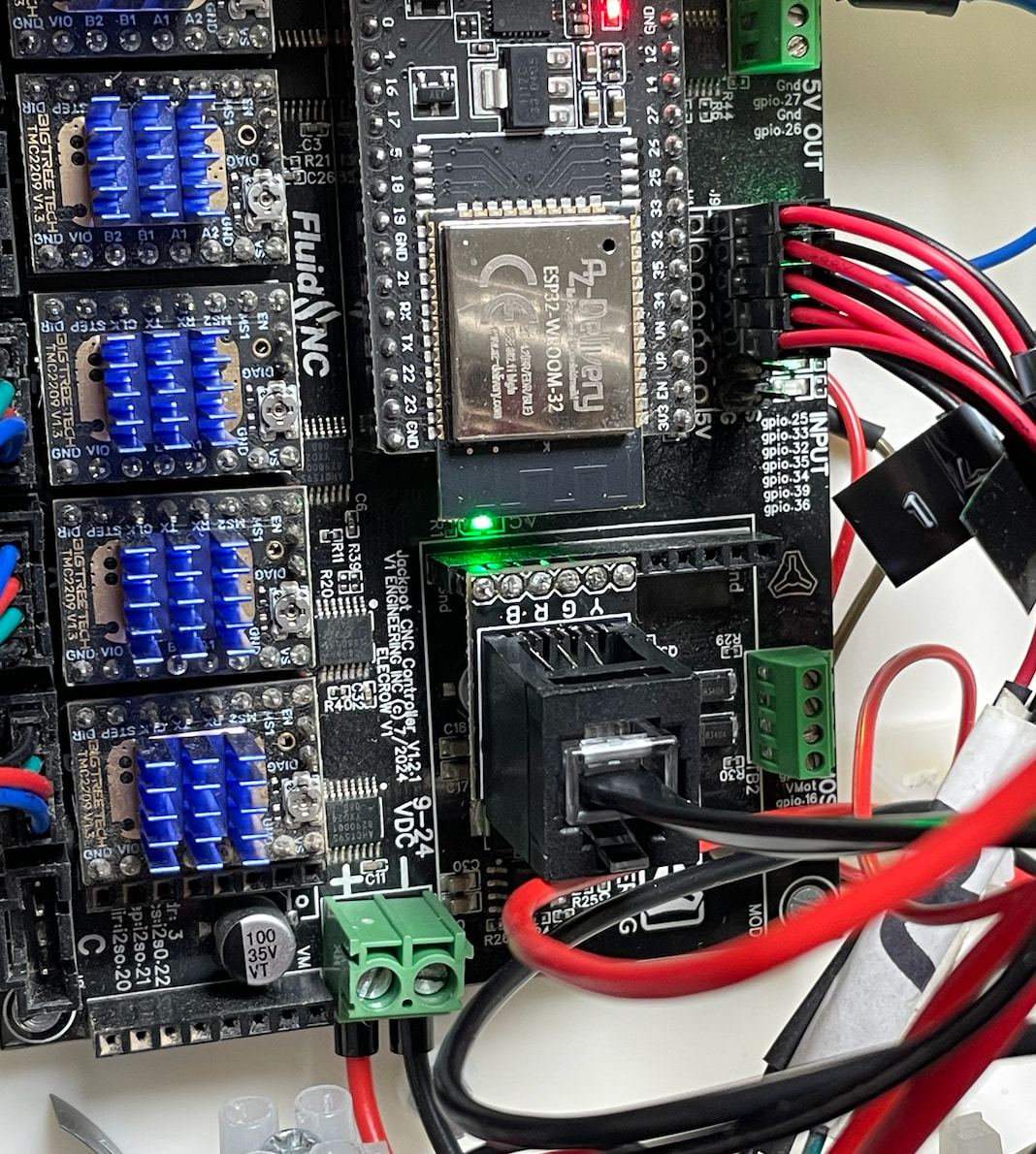
I tried the combination of Pins 13 & 14 first and then I switched to 12 & 15, which made no difference.
uart2:
txd_pin: gpio.15
rxd_pin: gpio.12
rts_pin: NO_PIN
cts_pin: NO_PIN
baud: 1000000
mode: 8N1
uart_channel2:
report_interval_ms: 75
uart_num: 2
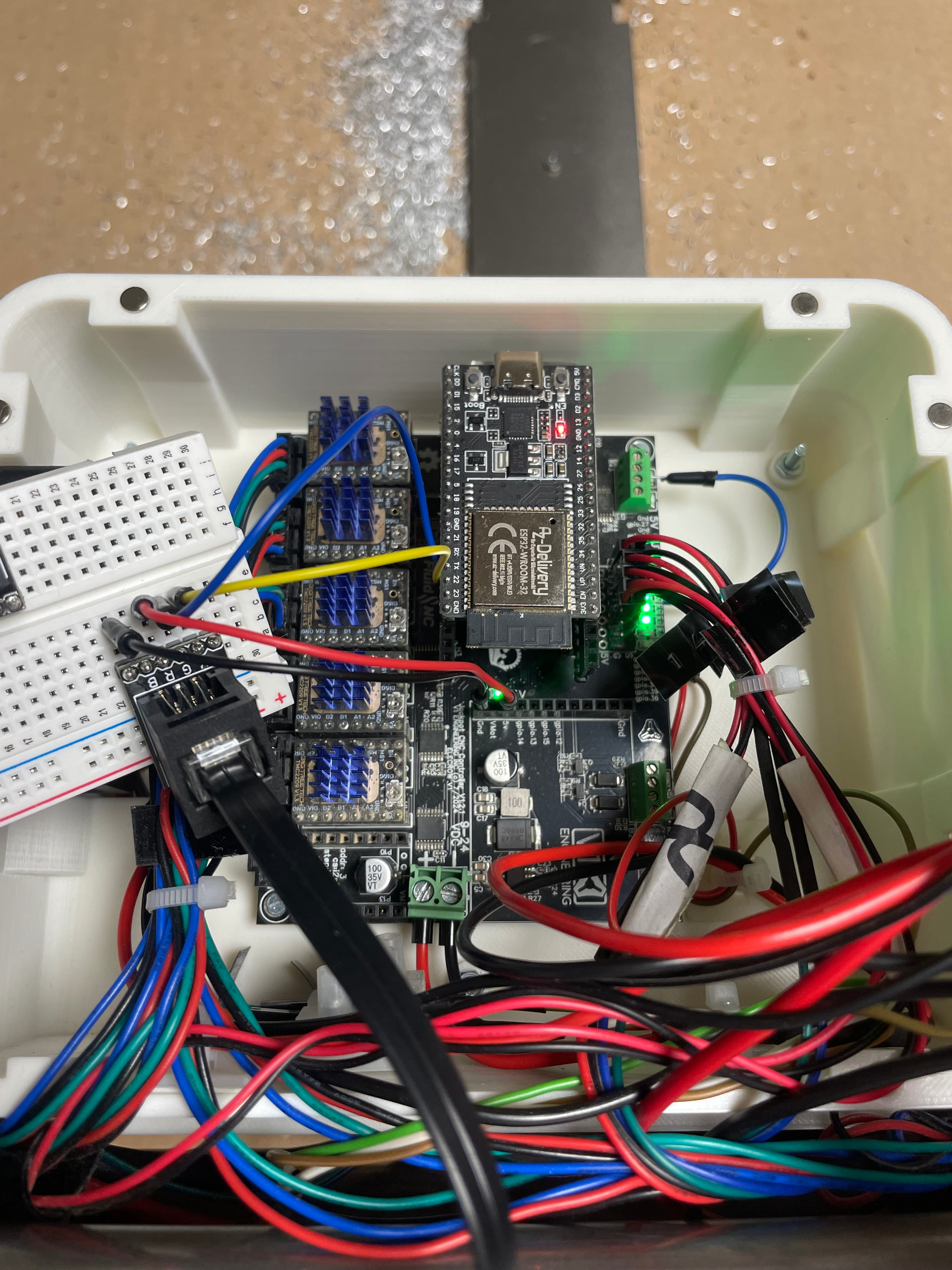
I tried to ditch the RJ12 Cable an hooked up the CYD via breadboard and jumper wires but also no luck. Display powers on as always, but no connection

I don’t get any error messages when starting up:
$G
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
ok
$SS
<Idle|MPos:0.000,0.000,0.000|FS:0,0|WCO:403.800,265.100,13.445>
[MSG:INFO: FluidNC v3.9.4 https://github.com/bdring/FluidNC]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.7-dirty]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config.yaml]
[MSG:INFO: Machine LowRider]
[MSG:INFO: Board Jackpot TMC2209]
[MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
[MSG:INFO: UART2 Tx:gpio.15 Rx:gpio.12 RTS:NO_PIN Baud:1000000]
[MSG:INFO: uart_channel2 created at report interval: 75]
[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21Min Pulse:2us]
[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
[MSG:INFO: Stepping:I2S_STATIC Pulse:2us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
[MSG:INFO: User Digital Output: 0 on Pin:gpio.26]
[MSG:INFO: User Digital Output: 1 on Pin:gpio.27]
[MSG:INFO: Axis count 3]
[MSG:INFO: Axis X (0.000,800.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
[MSG:INFO: X Neg Limit gpio.25]
[MSG:INFO: Axis Y (0.000,1600.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
[MSG:INFO: Y Neg Limit gpio.33]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
[MSG:INFO: Y2 Neg Limit gpio.35]
[MSG:INFO: Axis Z (0.000,100.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110]
[MSG:INFO: Z Pos Limit gpio.32]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
[MSG:INFO: Z2 Pos Limit gpio.34]
[MSG:INFO: X Axis driver test passed]
[MSG:INFO: Y Axis driver test passed]
[MSG:INFO: Y2 Axis driver test passed]
[MSG:INFO: Z Axis driver test passed]
[MSG:INFO: Z2 Axis driver test passed]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1]
[MSG:INFO: AP started]
[MSG:INFO: WiFi on]
[MSG:INFO: Captive Portal Started]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
[MSG:INFO: Flood coolant gpio.2]
[MSG:INFO: Mist coolant gpio.16]
[MSG:INFO: Probe gpio.36:low]
ok
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,100>
I did the speed control externally with an Arduino - the guys working previously on the machine tried to get the spindle module to work, which uses the same pins. Could there be some old attachments that block the CYD from working? Of course I tried to deleted the respectable lines already in the config - but maybe I missed something…
board: Jackpot TMC2209
name: LowRider
meta: SS26_MR
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 2
dir_delay_us: 1
disable_delay_us: 0
segments: 12
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
kinematics: {}
axes:
shared_stepper_disable_pin: NO_PIN
shared_stepper_reset_pin: NO_PIN
homing_runs: 2
x:
steps_per_mm: 50
max_rate_mm_per_min: 15000
acceleration_mm_per_sec2: 200
max_travel_mm: 800
soft_limits: true
homing:
cycle: 2
allow_single_axis: true
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300
seek_mm_per_min: 2000
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: gpio.25
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 3
tmc_2209:
addr: 0
cs_pin: NO_PIN
uart_num: 1
step_pin: i2so.2
direction_pin: i2so.1
disable_pin: I2SO.0
r_sense_ohms: 0.11
run_amps: 0.8
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.8
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
y:
steps_per_mm: 50
max_rate_mm_per_min: 5000
acceleration_mm_per_sec2: 200
max_travel_mm: 1600
soft_limits: true
homing:
cycle: 2
allow_single_axis: true
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300
seek_mm_per_min: 1500
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: gpio.33
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 3
tmc_2209:
addr: 1
cs_pin: NO_PIN
uart_num: 1
step_pin: i2so.5
direction_pin: i2so.4
disable_pin: I2SO.7
r_sense_ohms: 0.11
run_amps: 0.8
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.8
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
motor1:
limit_neg_pin: gpio.35
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 3
tmc_2209:
addr: 3
cs_pin: I2SO.14
uart_num: 1
step_pin: i2so.13
direction_pin: i2so.12
disable_pin: I2SO.15
r_sense_ohms: 0.11
run_amps: 0.8
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.8
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
z:
steps_per_mm: 200
max_rate_mm_per_min: 300
acceleration_mm_per_sec2: 50
max_travel_mm: 100
soft_limits: true
homing:
cycle: 1
allow_single_axis: true
positive_direction: true
mpos_mm: 100
feed_mm_per_min: 300
seek_mm_per_min: 800
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 3
tmc_2209:
addr: 2
cs_pin: NO_PIN
uart_num: 1
step_pin: i2so.10
direction_pin: i2so.9
disable_pin: I2SO.8
r_sense_ohms: 0.11
run_amps: 0.8
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.8
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 3
tmc_2209:
addr: 3
cs_pin: I2SO.19
uart_num: 1
step_pin: i2so.18
direction_pin: i2so.17
disable_pin: I2SO.16
r_sense_ohms: 0.11
run_amps: 0.8
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.8
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
fault_pin: NO_PIN
estop_pin: NO_PIN
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: false
hard_stop: false
macros: {}
start:
must_home: false
deactivate_parking: false
check_limits: true
parking:
enable: false
axis: Z
target_mpos_mm: -5
rate_mm_per_min: 800
pullout_distance_mm: 5
pullout_rate_mm_per_min: 250
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: NO_PIN
digital3_pin: NO_PIN
digital4_pin: NO_PIN
digital5_pin: NO_PIN
digital6_pin: NO_PIN
digital7_pin: NO_PIN
user_inputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
digital4_pin: NO_PIN
digital5_pin: NO_PIN
digital6_pin: NO_PIN
digital7_pin: NO_PIN
#Pendant
uart2:
txd_pin: gpio.15
rxd_pin: gpio.12
rts_pin: NO_PIN
cts_pin: NO_PIN
baud: 1000000
mode: 8N1
uart_channel2:
report_interval_ms: 75
uart_num: 2
I know not everyone is a fan of the CYD, but I hope you guys can help me get it going! Thanks in advance for every reply ![]()