Hi All,
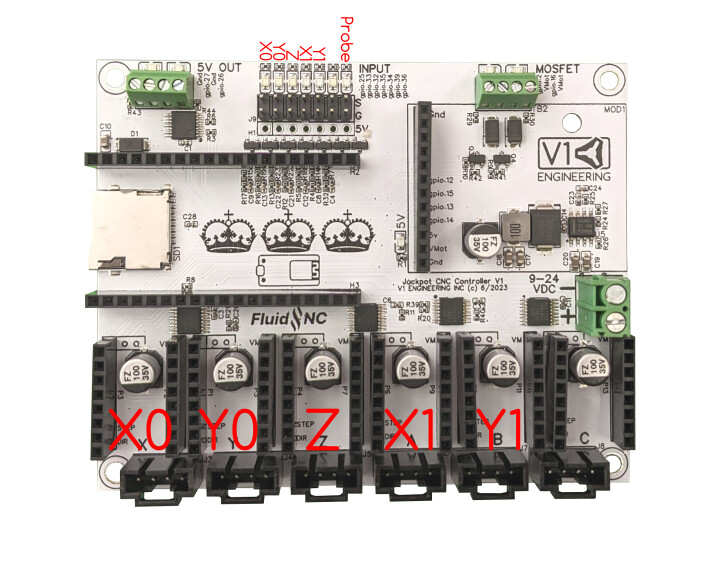
Just finished assembling my MPCNC Primo with the Jackpot controller. I was able to swap around the wiring to fix the initial mis-mapping issues I encountered, but I’m now stuck. I’m testing the mappings by jogging on the x/y/z axes. Y is now working fine, but the Z axis sends to two of my stepper motors instead of one.
This has resulted in the x axis only having one active motor and the z axis sending to two stepper motors. Example- When I click x+/x- on the jogging wheel, only one x motor is triggered. When I click z+/z- on the jogging wheel, the z axis does jog, but it also jogs another stepper motor (currently the other x motor).
I’m wondering if there’s a way to change the mapping for the second z motor so that is mapped to the x axis. Also, I ordered the Jackpot about a year ago and just finally had some time to finish up the build over xmas break, so I could very likely be working with old firmware. I see in my config.yaml file, it’s specifying the “lowrider” build, so I’m not sure if that affects anything. Anyway, here’s my config.yaml file. It doesn’t look like any other config.yaml files I’ve seen searching for a solution.here so I’m at a bit of a loss on what my next steps should be. Thanks in advance for any help!
"
board: Jackpot TMC2209 name: LowRider meta: 08-10-2023 RyanZ stepping: engine: I2S_static idle_ms: 255 pulse_us: 4 dir_delay_us: 1 disable_delay_us: 0 segments: 12 uart1: txd_pin: gpio.0 rxd_pin: gpio.4 rts_pin: NO_PIN cts_pin: NO_PIN baud: 115200 mode: 8N1 i2so: bck_pin: gpio.22 data_pin: gpio.21 ws_pin: gpio.17 spi: miso_pin: gpio.19 mosi_pin: gpio.23 sck_pin: gpio.18 sdcard: cs_pin: gpio.5 card_detect_pin: NO_PIN frequency_hz: 20000000 kinematics: Cartesian: axes: shared_stepper_disable_pin: NO_PIN shared_stepper_reset_pin: NO_PIN x: steps_per_mm: 50.000000 max_rate_mm_per_min: 9000.000000 acceleration_mm_per_sec2: 200.000000 max_travel_mm: 1220.000000 soft_limits: false homing: cycle: 3 allow_single_axis: true positive_direction: false mpos_mm: 0.000000 feed_mm_per_min: 300.000000 seek_mm_per_min: 1500.000000 settle_ms: 500 seek_scaler: 1.100000 feed_scaler: 1.100000 motor0: limit_neg_pin: gpio.25 limit_pos_pin: NO_PIN limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 4.000000 tmc_2209: addr: 0 cs_pin: NO_PIN uart_num: 1 step_pin: I2SO.2 direction_pin: I2SO.1 disable_pin: I2SO.0 r_sense_ohms: 0.110000 run_amps: 0.600000 hold_amps: 0.400000 microsteps: 8 toff_disable: 0 toff_stealthchop: 5 use_enable: false run_mode: StealthChop homing_mode: StealthChop stallguard: 0 stallguard_debug: false toff_coolstep: 3 y: steps_per_mm: 50.000000 max_rate_mm_per_min: 9000.000000 acceleration_mm_per_sec2: 200.000000 max_travel_mm: 2440.000000 soft_limits: false homing: cycle: 2 allow_single_axis: true positive_direction: false mpos_mm: 0.000000 feed_mm_per_min: 300.000000 seek_mm_per_min: 1500.000000 settle_ms: 500 seek_scaler: 1.100000 feed_scaler: 1.100000 motor0: limit_neg_pin: gpio.33 limit_pos_pin: NO_PIN limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 4.000000 tmc_2209: addr: 1 cs_pin: NO_PIN uart_num: 1 step_pin: I2SO.5 direction_pin: I2SO.4 disable_pin: I2SO.7 r_sense_ohms: 0.110000 run_amps: 0.600000 hold_amps: 0.400000 microsteps: 8 toff_disable: 0 toff_stealthchop: 5 use_enable: false run_mode: StealthChop homing_mode: StealthChop stallguard: 0 stallguard_debug: false toff_coolstep: 3 motor1: limit_neg_pin: gpio.35 limit_pos_pin: NO_PIN limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 4.000000 tmc_2209: addr: 3 cs_pin: I2SO.14 uart_num: 1 step_pin: I2SO.13 direction_pin: I2SO.12 disable_pin: I2SO.15 r_sense_ohms: 0.110000 run_amps: 0.600000 hold_amps: 0.400000 microsteps: 8 toff_disable: 0 toff_stealthchop: 5 use_enable: false run_mode: StealthChop homing_mode: StealthChop stallguard: 0 stallguard_debug: false toff_coolstep: 3 z: steps_per_mm: 200.000000 max_rate_mm_per_min: 1200.000000 acceleration_mm_per_sec2: 80.000000 max_travel_mm: 300.000000 soft_limits: false homing: cycle: 1 allow_single_axis: true positive_direction: true mpos_mm: 0.000000 feed_mm_per_min: 300.000000 seek_mm_per_min: 800.000000 settle_ms: 500 seek_scaler: 1.100000 feed_scaler: 1.100000 motor0: limit_neg_pin: NO_PIN limit_pos_pin: gpio.32 limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 4.000000 tmc_2209: addr: 2 cs_pin: NO_PIN uart_num: 1 step_pin: I2SO.10 direction_pin: I2SO.9 disable_pin: I2SO.8 r_sense_ohms: 0.110000 run_amps: 0.600000 hold_amps: 0.400000 microsteps: 8 toff_disable: 0 toff_stealthchop: 5 use_enable: false run_mode: StealthChop homing_mode: StealthChop stallguard: 0 stallguard_debug: false toff_coolstep: 3 motor1: limit_neg_pin: NO_PIN limit_pos_pin: gpio.34 limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 4.000000 tmc_2209: addr: 3 cs_pin: I2SO.19 uart_num: 1 step_pin: I2SO.18 direction_pin: I2SO.17 disable_pin: I2SO.16 r_sense_ohms: 0.110000 run_amps: 0.600000 hold_amps: 0.400000 microsteps: 8 toff_disable: 0 toff_stealthchop: 5 use_enable: false run_mode: StealthChop homing_mode: StealthChop stallguard: 0 stallguard_debug: false toff_coolstep: 3 a: steps_per_mm: 80.000000 max_rate_mm_per_min: 1000.000000 acceleration_mm_per_sec2: 25.000000 max_travel_mm: 1000.000000 soft_limits: false homing: cycle: 0 allow_single_axis: true positive_direction: true mpos_mm: 0.000000 feed_mm_per_min: 50.000000 seek_mm_per_min: 200.000000 settle_ms: 250 seek_scaler: 1.100000 feed_scaler: 1.100000 motor0: limit_neg_pin: NO_PIN limit_pos_pin: NO_PIN limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 1.000000 null_motor: b: steps_per_mm: 80.000000 max_rate_mm_per_min: 1000.000000 acceleration_mm_per_sec2: 25.000000 max_travel_mm: 1000.000000 soft_limits: false homing: cycle: 0 allow_single_axis: true positive_direction: true mpos_mm: 0.000000 feed_mm_per_min: 50.000000 seek_mm_per_min: 200.000000 settle_ms: 250 seek_scaler: 1.100000 feed_scaler: 1.100000 motor0: limit_neg_pin: NO_PIN limit_pos_pin: NO_PIN limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 1.000000 null_motor: c: steps_per_mm: 80.000000 max_rate_mm_per_min: 5000.000000 acceleration_mm_per_sec2: 100.000000 max_travel_mm: 300.000000 soft_limits: false homing: cycle: 0 allow_single_axis: true positive_direction: true mpos_mm: 150.000000 feed_mm_per_min: 100.000000 seek_mm_per_min: 800.000000 settle_ms: 500 seek_scaler: 1.100000 feed_scaler: 1.100000 motor0: limit_neg_pin: gpio.39:low limit_pos_pin: NO_PIN limit_all_pin: NO_PIN hard_limits: false pulloff_mm: 3.000000 tmc_2209: addr: 3 cs_pin: I2SO.22 uart_num: 1 step_pin: I2SO.21 direction_pin: I2SO.20 disable_pin: I2SO.23 r_sense_ohms: 0.110000 run_amps: 0.100000 hold_amps: 0.050000 microsteps: 16 toff_disable: 0 toff_stealthchop: 5 use_enable: false run_mode: StealthChop homing_mode: StealthChop stallguard: 0 stallguard_debug: false toff_coolstep: 3 control: safety_door_pin: NO_PIN reset_pin: NO_PIN feed_hold_pin: NO_PIN cycle_start_pin: NO_PIN macro0_pin: NO_PIN macro1_pin: NO_PIN macro2_pin: NO_PIN macro3_pin: NO_PIN fault_pin: NO_PIN estop_pin: NO_PIN coolant: flood_pin: gpio.2 mist_pin: gpio.16 delay_ms: 0 probe: pin: gpio.36:low toolsetter_pin: NO_PIN check_mode_start: true macros: startup_line0: startup_line1: macro0: macro1: macro2: macro3: after_homing: after_reset: after_unlock: start: must_home: false deactivate_parking: false check_limits: false parking: enable: false axis: Z target_mpos_mm: -5.000000 rate_mm_per_min: 800.000000 pullout_distance_mm: 5.000000 pullout_rate_mm_per_min: 250.000000 user_outputs: analog0_pin: NO_PIN analog1_pin: NO_PIN analog2_pin: NO_PIN analog3_pin: NO_PIN analog0_hz: 5000 analog1_hz: 5000 analog2_hz: 5000 analog3_hz: 5000 digital0_pin: gpio.26 digital1_pin: gpio.27 digital2_pin: NO_PIN digital3_pin: NO_PIN digital4_pin: NO_PIN digital5_pin: NO_PIN digital6_pin: NO_PIN digital7_pin: NO_PIN NoSpindle: arc_tolerance_mm: 0.002000 junction_deviation_mm: 0.010000 verbose_errors: false report_inches: false enable_parking_override_control: false use_line_numbers: false planner_blocks: 32
"