Working on getting the dust collection a little better. I made the dust shoe so that I can put a little removable cap on top with vacuum bristles to keep better suction power. My current design requires removing the bristles from an off-the-shelf CNC brush and carefully glueing them on, but that process actually kinda sucks (no pun intended).
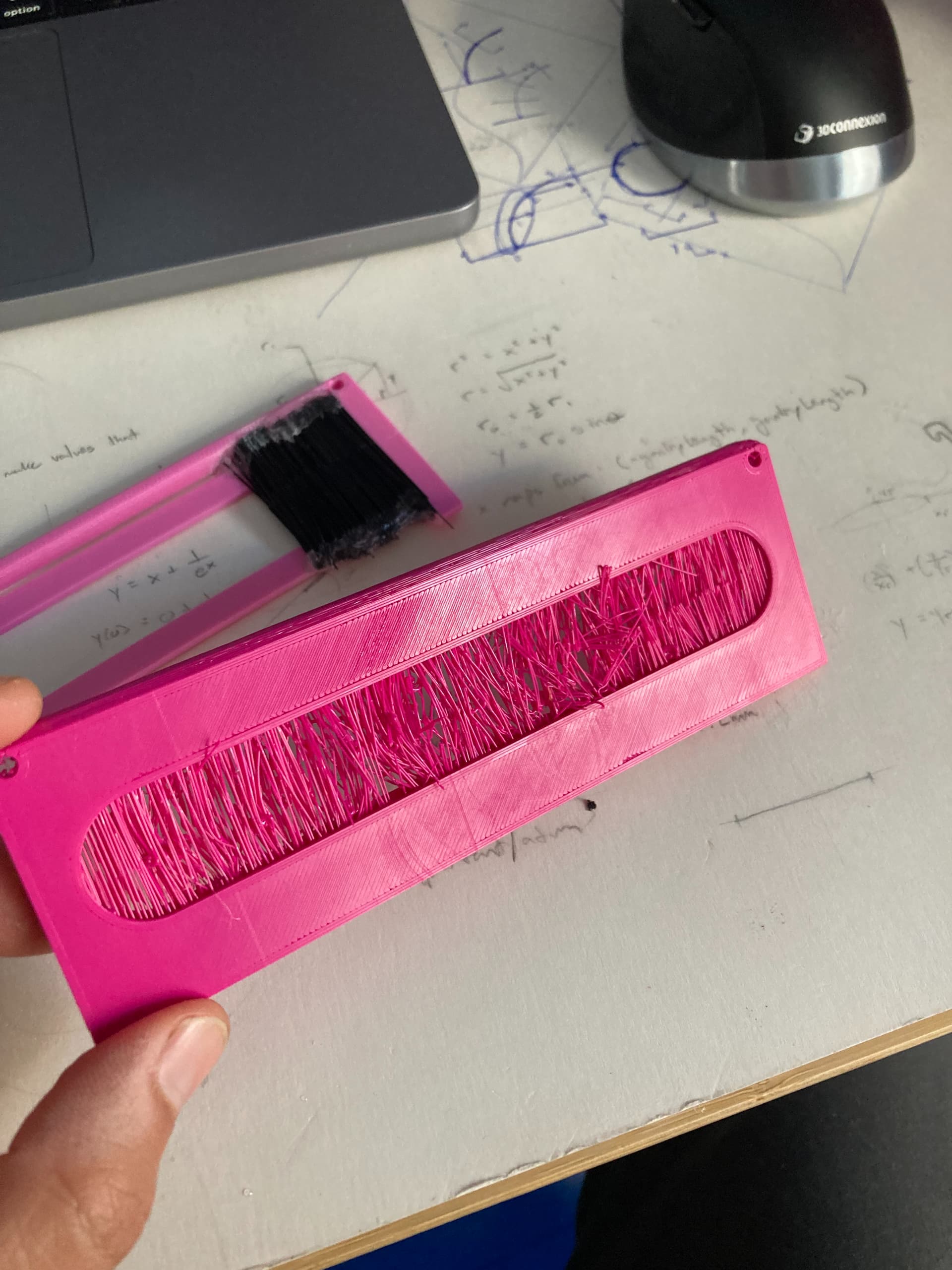
I then started experimenting with a fully 3D printed solution. If they can make the bristles out of Nylon, why can’t I print them out of PETG? Taking inspiration from those hairy prints people make, I decided to try something similar. Seemed promising, but the bristles tend to get ripped out once a router bit is spinning through them.
I tried another test with some glue ports so that I could glue the bristles down to hopefully keep them in place better. This worked, but it seems like the PETG is not quite durable enough to withstand the router going through it (at least at the thickness the currently are).
I could try to go thinner, but I think my printer would have trouble making that work. I think TPU might be the call for the next iteration. I’m going to just print multiple thin sheets of little brushes that can be stacked on top of each other. I think that will work a lot better. We shall see!
Did you consider bristles made from TPU like I did for the LR3 and Ryan now does for the LR4? I regrettably have no idea how the bristles are mounted later on, do you have a picture of that?
Another option to consider could be a draughts (draft) excluder brush made for doors and windows - they come with a metal or plastic spine which could easily be fixed in place in the print or perhaps just a replacement brush and print a channel for it.
Ahhh genius! I did not know I was literally making a letterbox draft excluder hahahh. Fair enough. I’ll definitely look into that more to see if I can’t get some easy off-the-shelf solution.
Doing some testing with TPU bristles. Works super well! Almost too well hahah - I can definitely feel the whole machine being suctioned to the workpiece a bit. But that also helps keep the machine flat on the workpiece, so we’ll just call it a feature.
Here’s a little demo on MDF. I start running into the masking tape work-holding at one point and get a little stuck . It seems to keep course pretty well through that, though, which is great to see.
So is the round thing in the middle a screen? What made you go with that round shape compared to something a bit bigger or even a phone serving a webpage?
Oh that’s honestly a great idea to use a phone as the screen! Didn’t think about that.
I chose this display because I wanted a cheap, easy to implement UI. I went with the round shape cause I liked the way it looked and I had a vision of how I would build the UI around it (similar to a compass, showing you where to go). Bigger would be better, but I didn’t stumble onto anything readily available at a decent price point. These ones are commonly used for smart watches, so they’re super commonly available and pretty cheap (the one I am using is a bit more expensive just because it’s from a more reputable brand and has nice connectors, but there are tons of way cheaper options). The other thing with bigger displays is you start to reach a limit with the microcontroller’s processing capabilities. The bigger you make the display, the more pixels you add, meaning more data the microcontroller has to send to the display for each update cycle. It’s doing everything synchronously, so you have to make sure you’re updating the display fast enough to still be able to get sensor readings at a constant rate and update the steppers at a minimum frequency. I’m already starting to hit a limit right now when making a more complex UI hahaha and it’s just circles and lines right now. I’m looking into making the UI asynchronous if possible, but I’m not sure if Teensy can do that… That’d make a bigger display and more complex user interfaces a lot more doable