aego
July 30, 2025, 10:48pm
1
I am having hard time to configure a YAML file for my laser engraver running FluidNC on a BTT Rodent. I have managed to get everything working except the Y and A motors work together. Could someone kindly share with me the YAML file of a 3-axis CNC? Actually, I only need the section related to the Y axis so I can try to understand what is wrong in my configuration. My Y axis YAML is this:#positive_direction: false
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:low
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 1.000
tmc_5160:
step_pin: I2SO.5
direction_pin: I2SO.4:low
disable_pin: I2SO.7
cs_pin: NO_PIN
spi_index: 2
r_sense_ohms: 0.075
run_amps: 0.5
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: CoolStep
homing_mode: CoolStep
stallguard: 16
stallguard_debug: false
toff_coolstep: 3
tpfd: 4
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:low
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 1.000
tmc_5160:
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
cs_pin: NO_PIN
spi_index: 4
r_sense_ohms: 0.075
run_amps: 0.5
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: CoolStep
homing_mode: CoolStep
stallguard: 16
stallguard_debug: false
toff_coolstep: 3
tpfd: 4
angelo e g oliveira:
My Y axis YAML is this:
Hello, Angelo. Welcome to the V1 community forums.
It would probably be better if you posted your full config.yaml file, using the preformatted text capability of the forum (it’s the icon that looks like this
I’m confused why you are looking for a 3 axis config with an A axis.
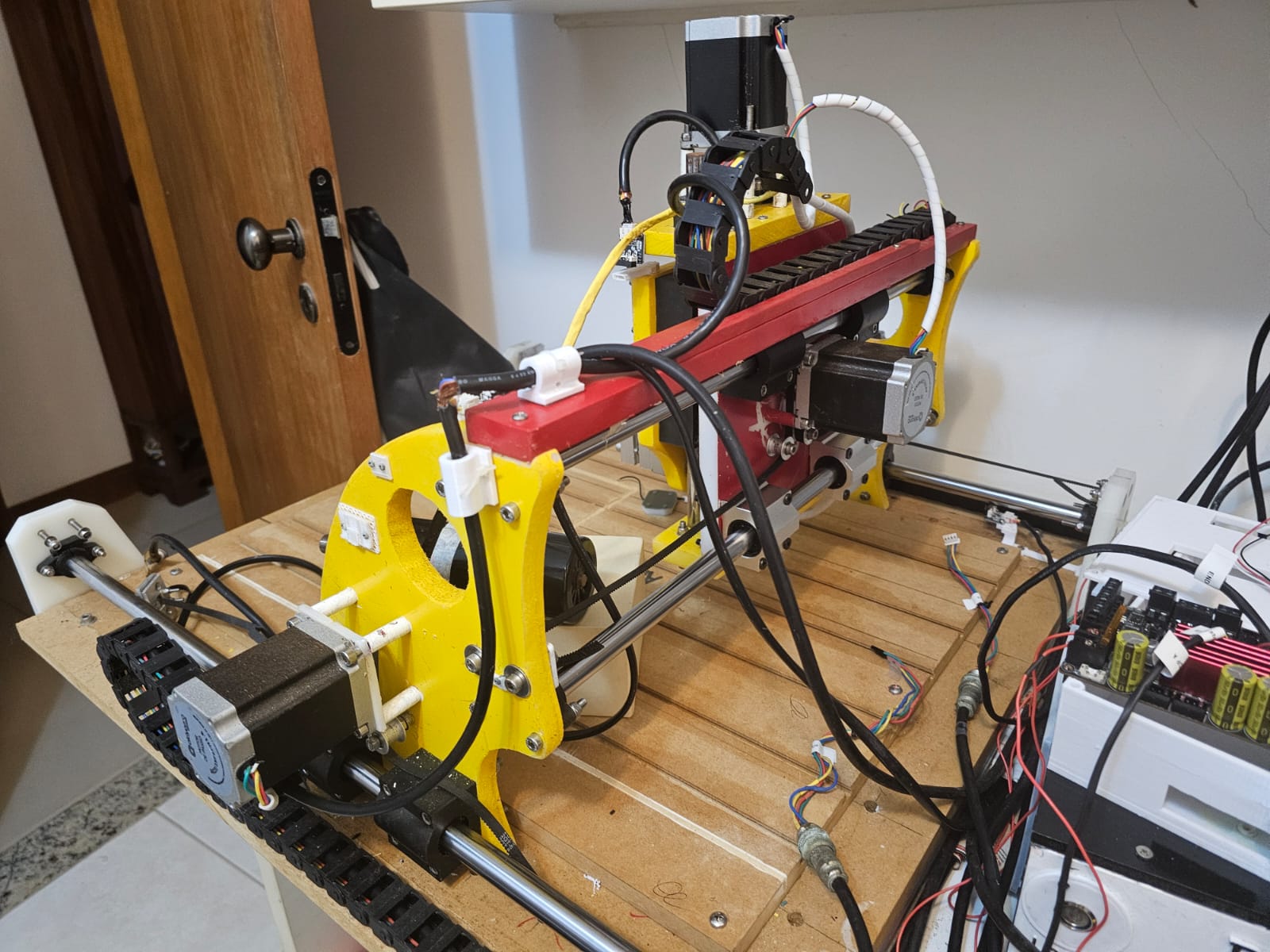
Can you post pictures of your machine setup?
Do you have no Laser Z height control (or manual Z), and are using a rotary axis?
We can’t really help suggest a configuration unless we understand fullly how your machine is built and how you use it.
We’re also not experts here on the BTT rodent, which is very much not a V1 Jackpot board nor a Bart Dring controller design. It does run FluidNC and Bart seems to think it’s a respectable board.
We’ll do what we can to help you, but might be limited by your board not being one of the V1 boards.
aego
July 31, 2025, 1:18am
3
``My CNC is partially disassembled. It used to work with Arduino and I’m trying to make this upgrade with Rodent. Sorry if it got confusing, but it’s not axis A, it’s motor A. That is, Y axis with 2 motors. Motor0 (Y) and motor1 (A which the board designates as E). At the moment I’m just testing the motor activation, that’s why the mess of the CNC. I just made a change in run_amps from 0.5 to 1.5, but I haven’t tested it yet.`
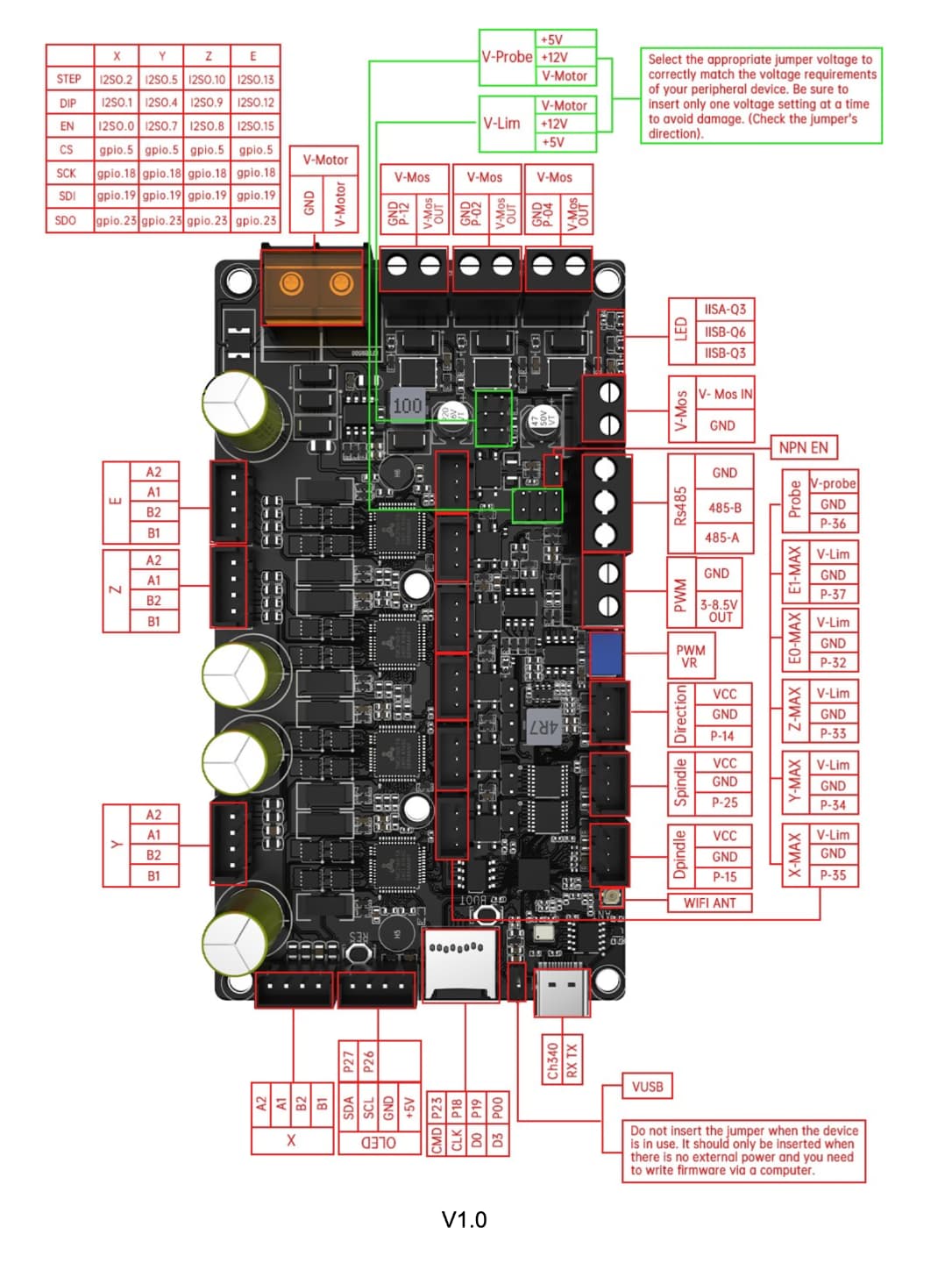
board: BTT Rodent V1.0
kinematics:
Cartesian:
# stepping:
# engine: RMT
# idle_ms: 250
# dir_delay_us: 1
# pulse_us: 2
# disable_delay_us: 0
stepping:
engine: I2S_STREAM
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 800.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 200.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.35:low
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 1.000
tmc_5160:
step_pin: I2SO.2
direction_pin: I2SO.1
disable_pin: I2SO.0
cs_pin: gpio.5
spi_index: 1
r_sense_ohms: 0.075
run_amps: 1.5
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: CoolStep
homing_mode: CoolStep
stallguard: 16
stallguard_debug: false
toff_coolstep: 3
tpfd: 4
y:
steps_per_mm: 800.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 430.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
#positive_direction: false
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 200.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:low
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 1.000
tmc_5160:
step_pin: I2SO.5
direction_pin: I2SO.4:low
disable_pin: I2SO.7
cs_pin: NO_PIN
spi_index: 2
r_sense_ohms: 0.075
#run_amps: 0.5 ALTEREI PARA 1.5
run_amps: 1.5
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: CoolStep
homing_mode: CoolStep
stallguard: 16
stallguard_debug: false
toff_coolstep: 3
tpfd: 4
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:low
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 1.000
tmc_5160:
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
cs_pin: NO_PIN
spi_index: 4
r_sense_ohms: 0.075
#run_amps: 0.5 ALTEREI PARA 1.5
run_amps: 1.5
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: CoolStep
homing_mode: CoolStep
stallguard: 16
stallguard_debug: false
toff_coolstep: 3
tpfd: 4
z:
steps_per_mm: 800.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 50.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.33:low
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 1.000
tmc_5160:
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
cs_pin: NO_PIN
spi_index: 3
r_sense_ohms: 0.075
run_amps: 1.500
hold_amps: 0.500
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: CoolStep
homing_mode: CoolStep
stallguard: 16
stallguard_debug: false
toff_coolstep: 3
tpfd: 4
a:
# E0
steps_per_mm: 800.000
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 430.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 200.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
#limit_pos_pin: gpio.32:low
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 1.000
tmc_5160:
#step_pin: I2SO.13
#direction_pin: I2SO.12
#disable_pin: I2SO.15
cs_pin: NO_PIN
spi_index: 4
r_sense_ohms: 0.075
run_amps: 0.5
hold_amps: 0.5
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: CoolStep
homing_mode: CoolStep
stallguard: 16
stallguard_debug: false
toff_coolstep: 3
tpfd: 4
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.0
card_detect_pin: NO_PIN
frequency_hz: 8000000
# I2SO.3
# coolant:
# flood_pin: gpio.2:low
# mist_pin: gpio.3:low
# gpio.4 # HB MOS
# probe:
# pin: gpio.5:low:pu
# toolsetter_pin: gpio.14:low
# Begin Huanyang
uart1:
txd_pin: gpio.15
rxd_pin: gpio.16
rts_pin: gpio.14
baud: 9600
mode: 8N1
Huanyang:
uart_num: 1
modbus_id: 1
tool_num: 0
speed_map: 0=0% 0=25% 6000=25% 24000=100%
off_on_alarm: false
# PWM:
# pwm_hz: 5000
# output_pin: gpio.13
# enable_pin: gpio.25
# direction_pin: gpio.15
# disable_with_s0: false
# s0_with_disable: false
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0% 10000=100%
# off_on_alarm: false
i2c0:
sda_pin: gpio.27
scl_pin: gpio.26
oled:
i2c_num: 0
i2c_address: 60
width: 128
height: 64
radio_delay_ms: 1000
status_outputs:
report_interval_ms: 500
idle_pin: I2SO.11:low
run_pin: I2SO.14:low
alarm_pin: I2SO.3:low
# hold_pin: gpio.16
Let’s confirm some things.
Which motors are connected to which connectors on the rodent?
Also, what endstops are on your machine, which motor and axis are they associated with, and where are they plugged into your controller?
How is your laser connected to the rodent?