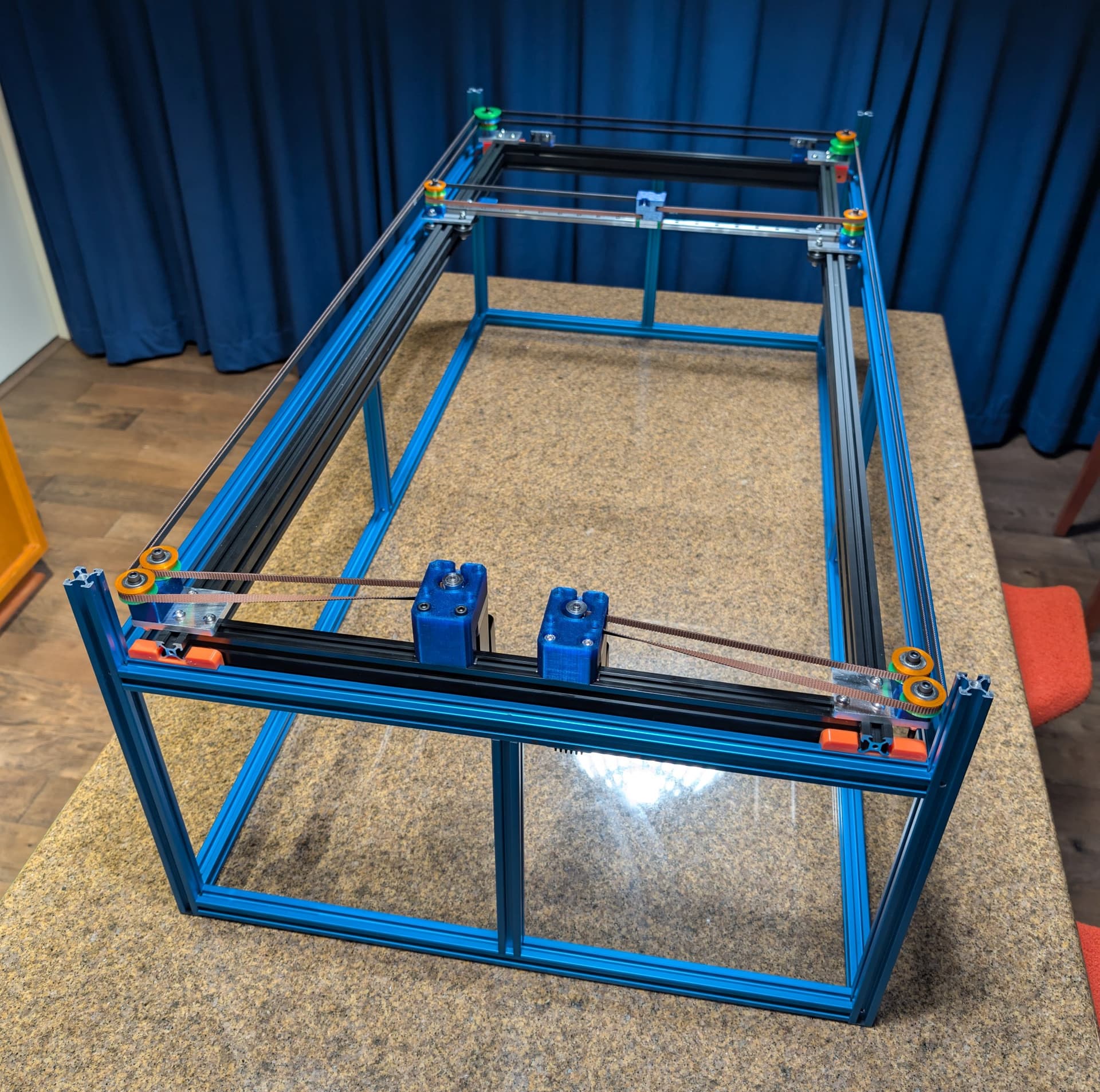
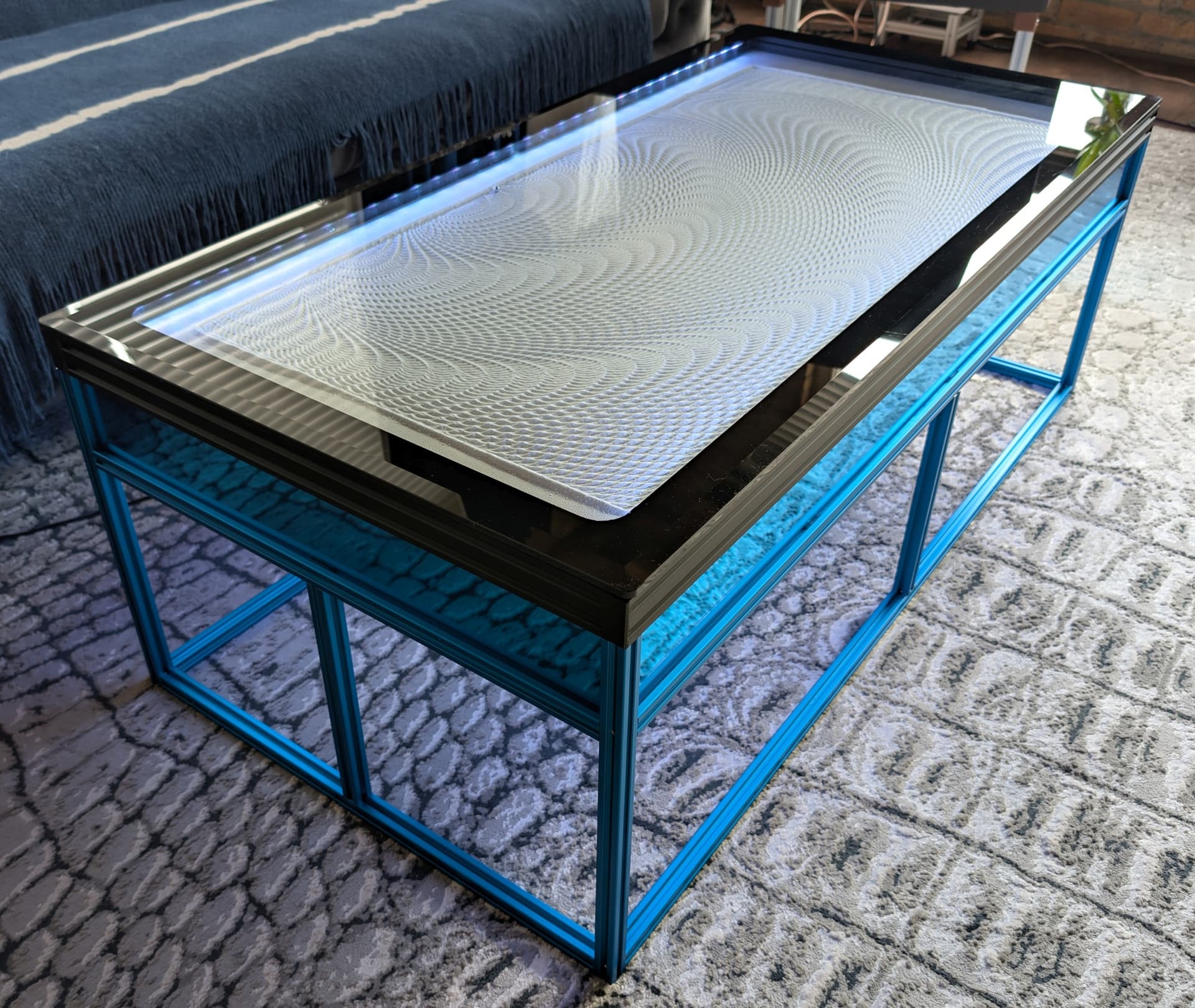
I built a new table to replace Arrakis 2.0, making some changes to the design that I hope will be improvements. The new table uses a 24 x 48” glass top - chosen for slightly smaller size than Arrakis 2.0, and lower replacement cost (I broke the glass on Arrakis 2.0 and it cost $330 to replace it). Arrakis 3.0 can fit through doorways without having to turn it on its side.
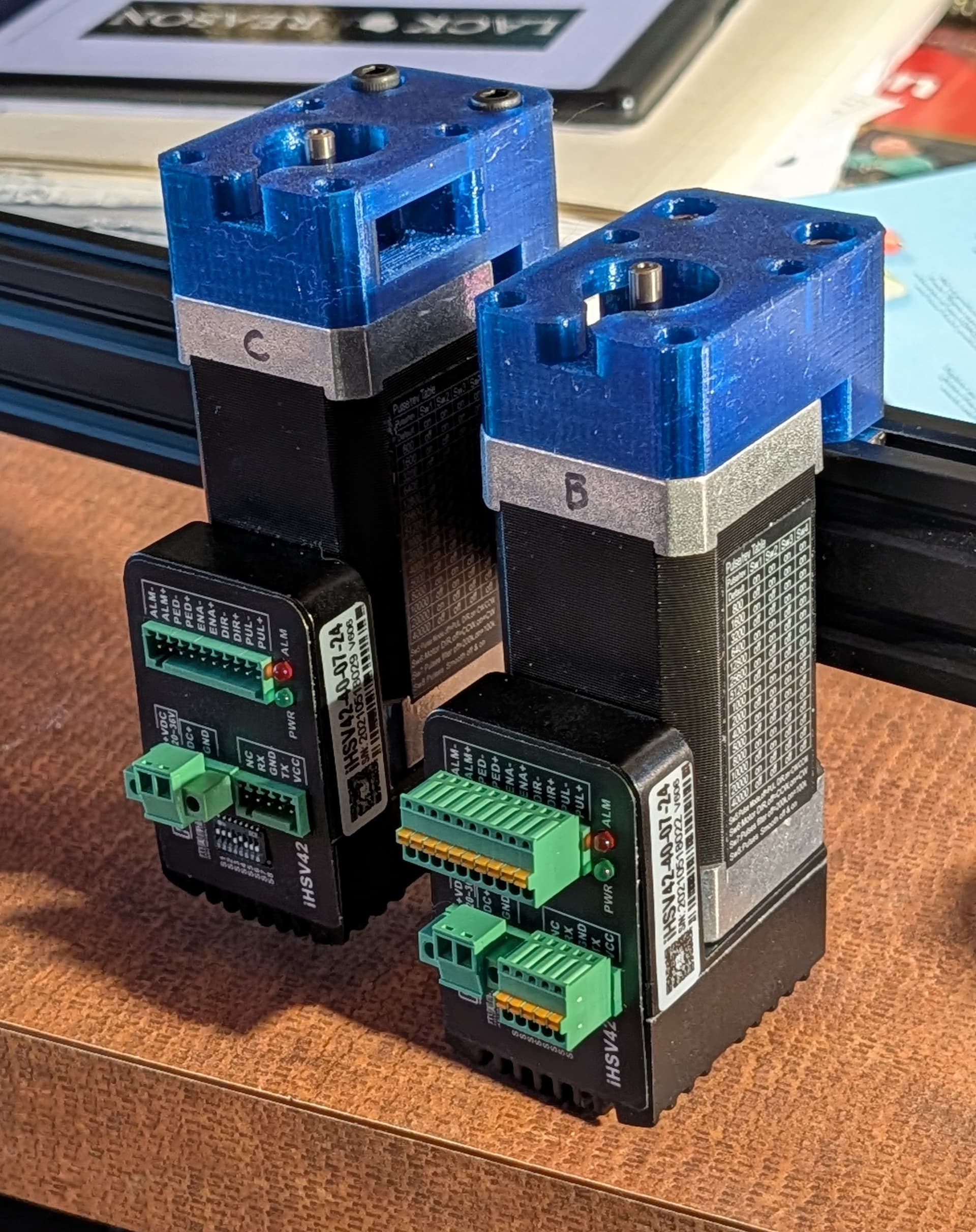
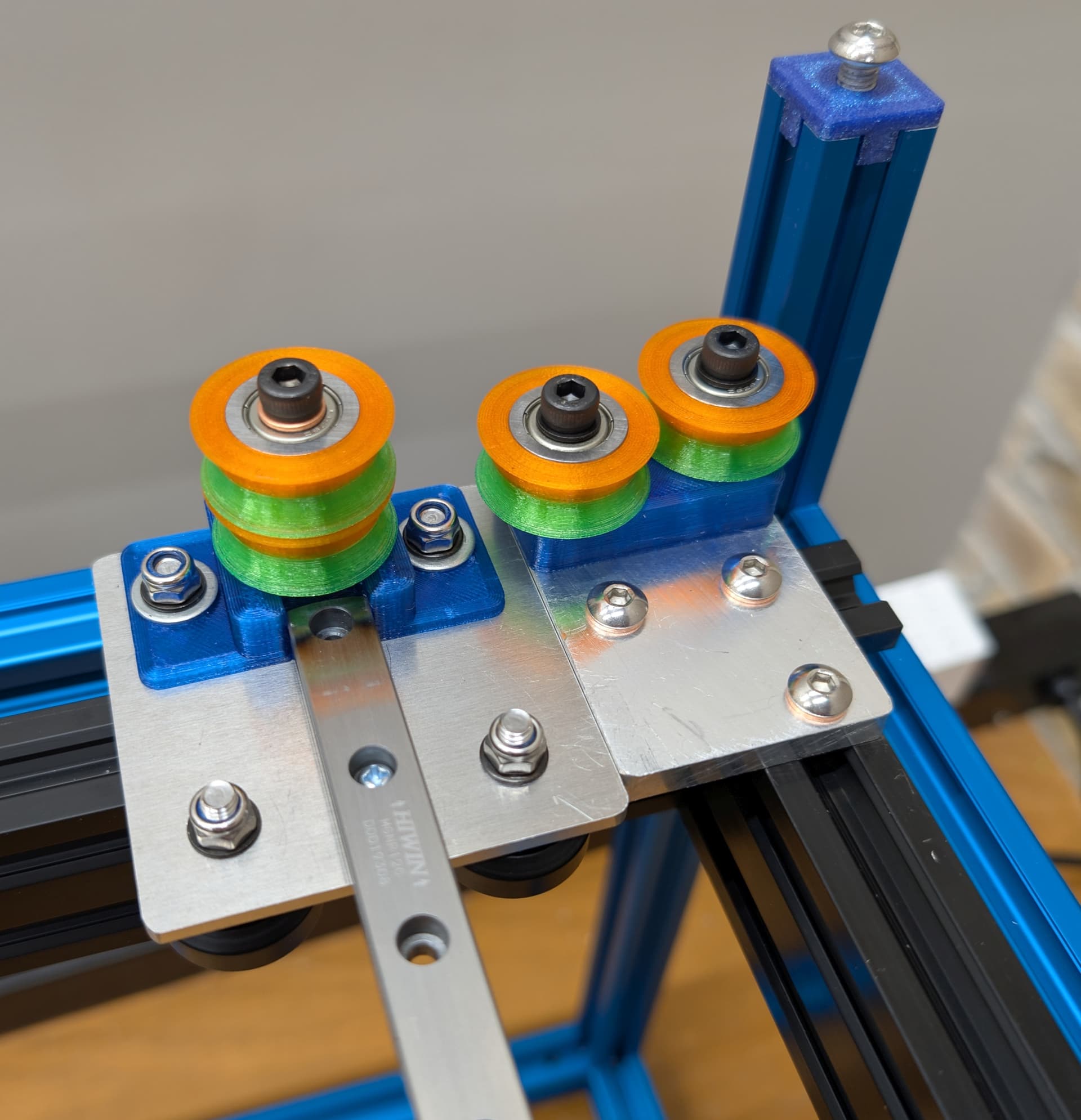
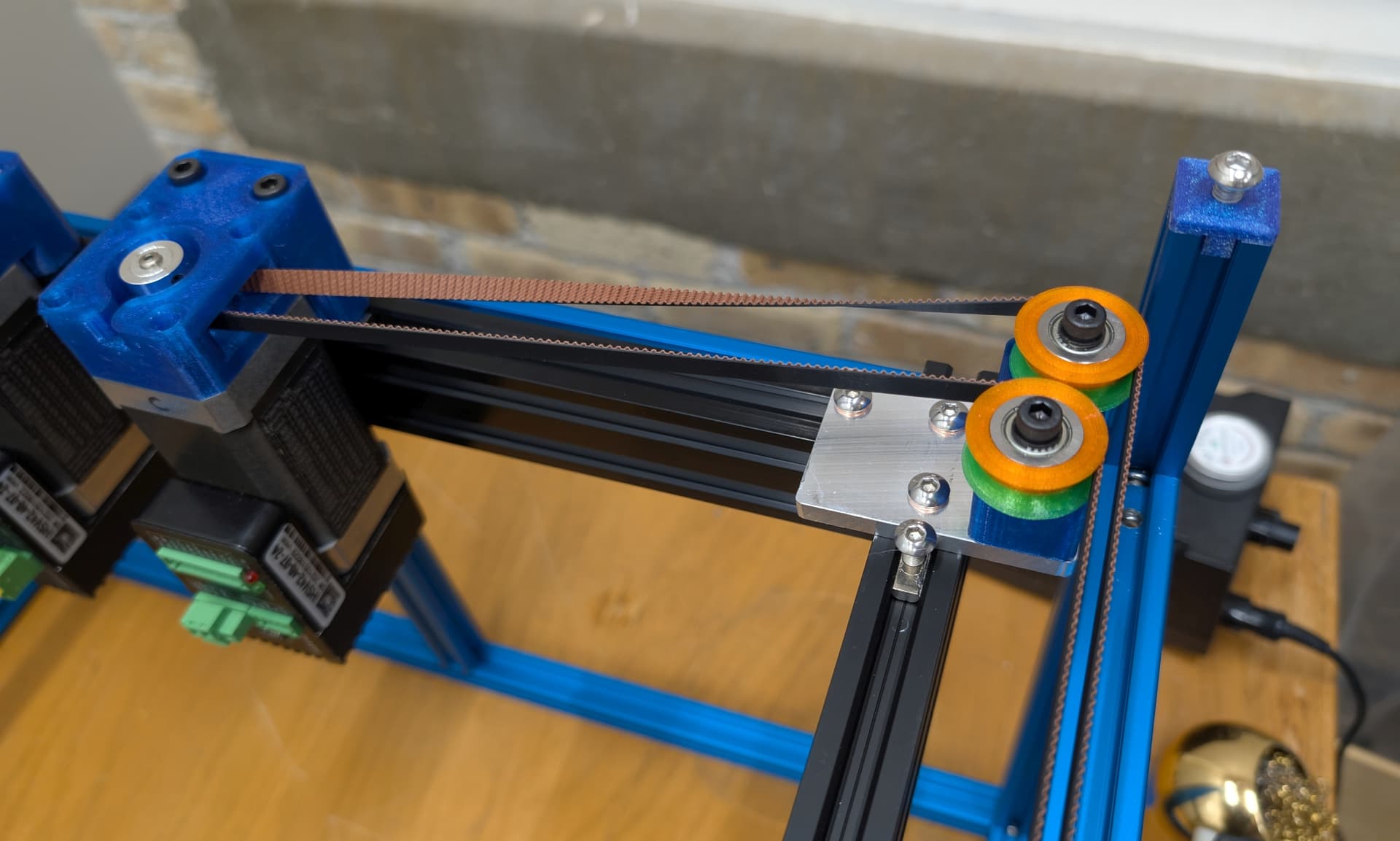
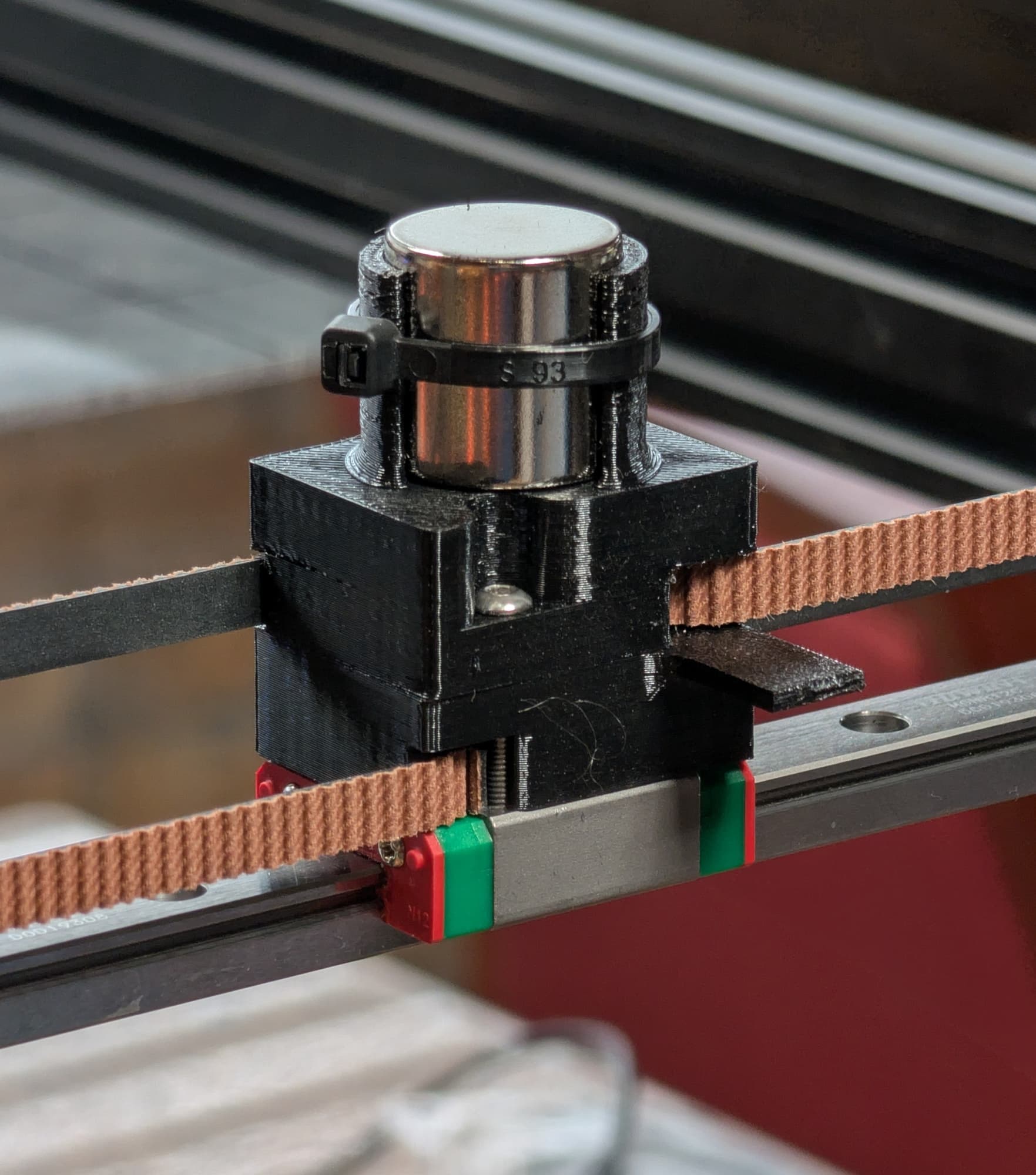
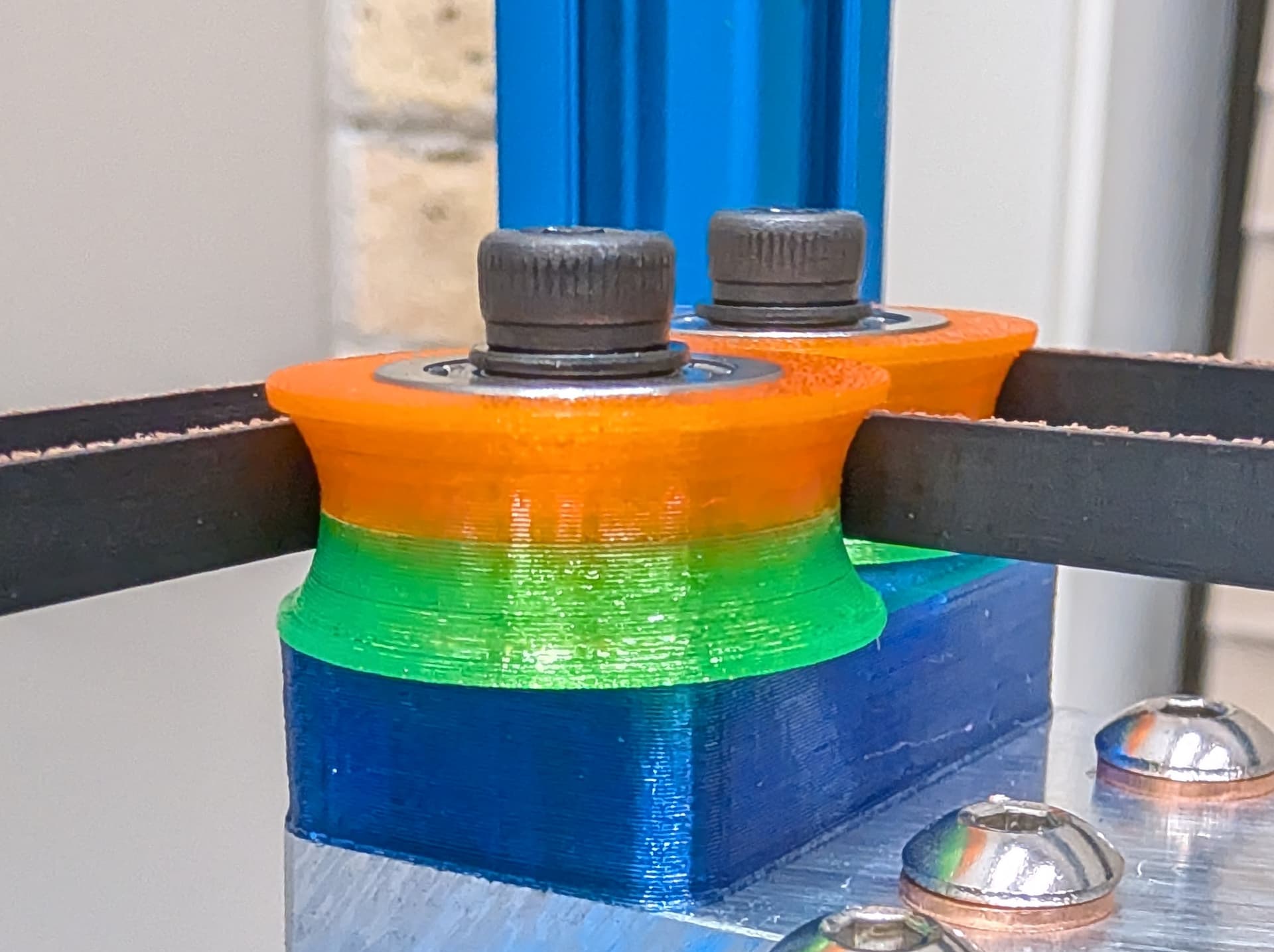
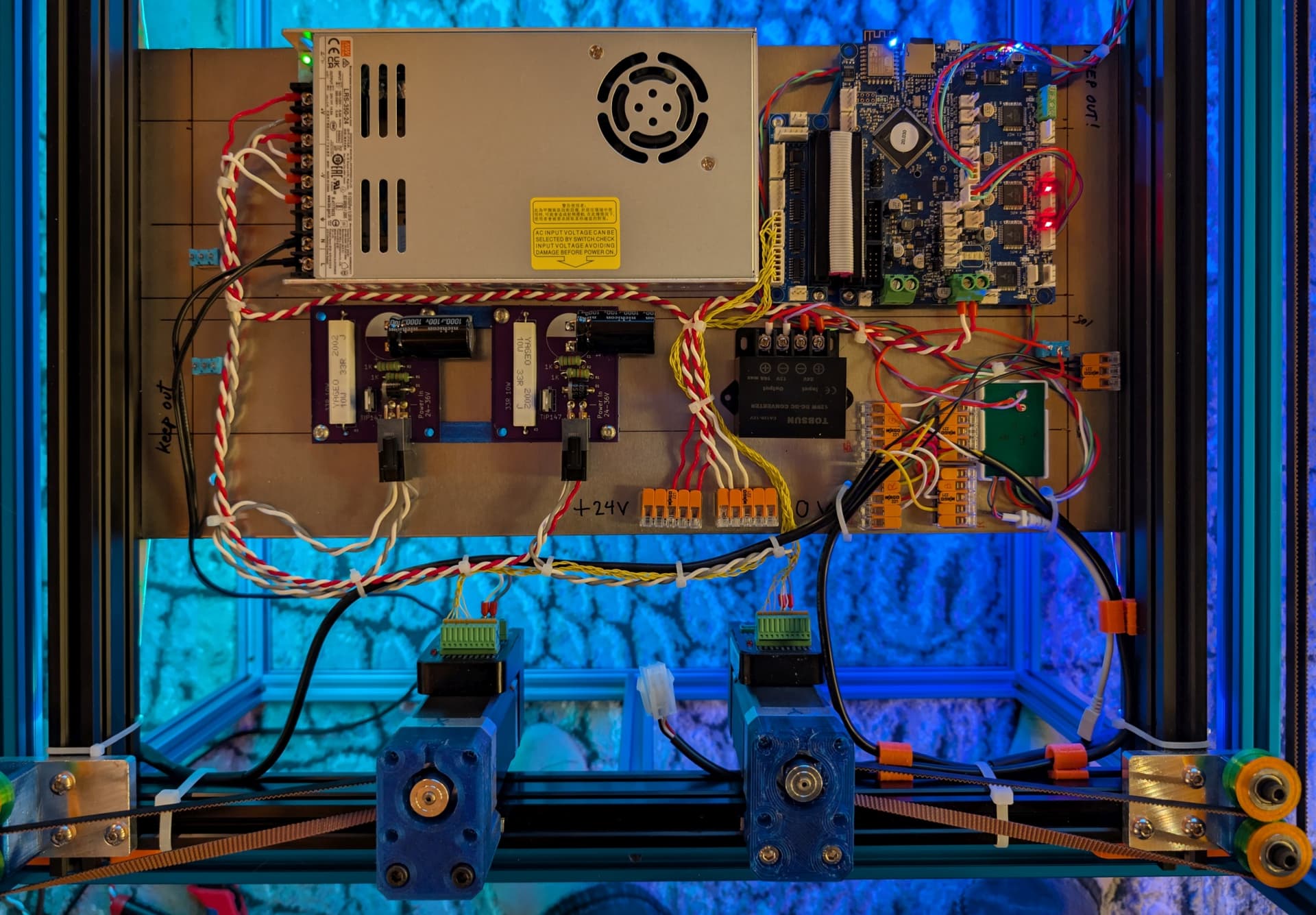
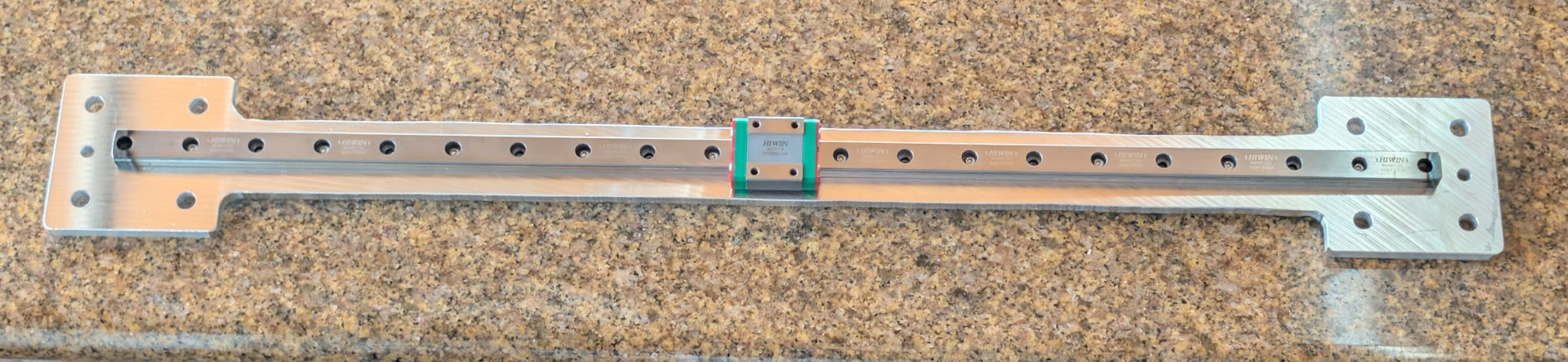
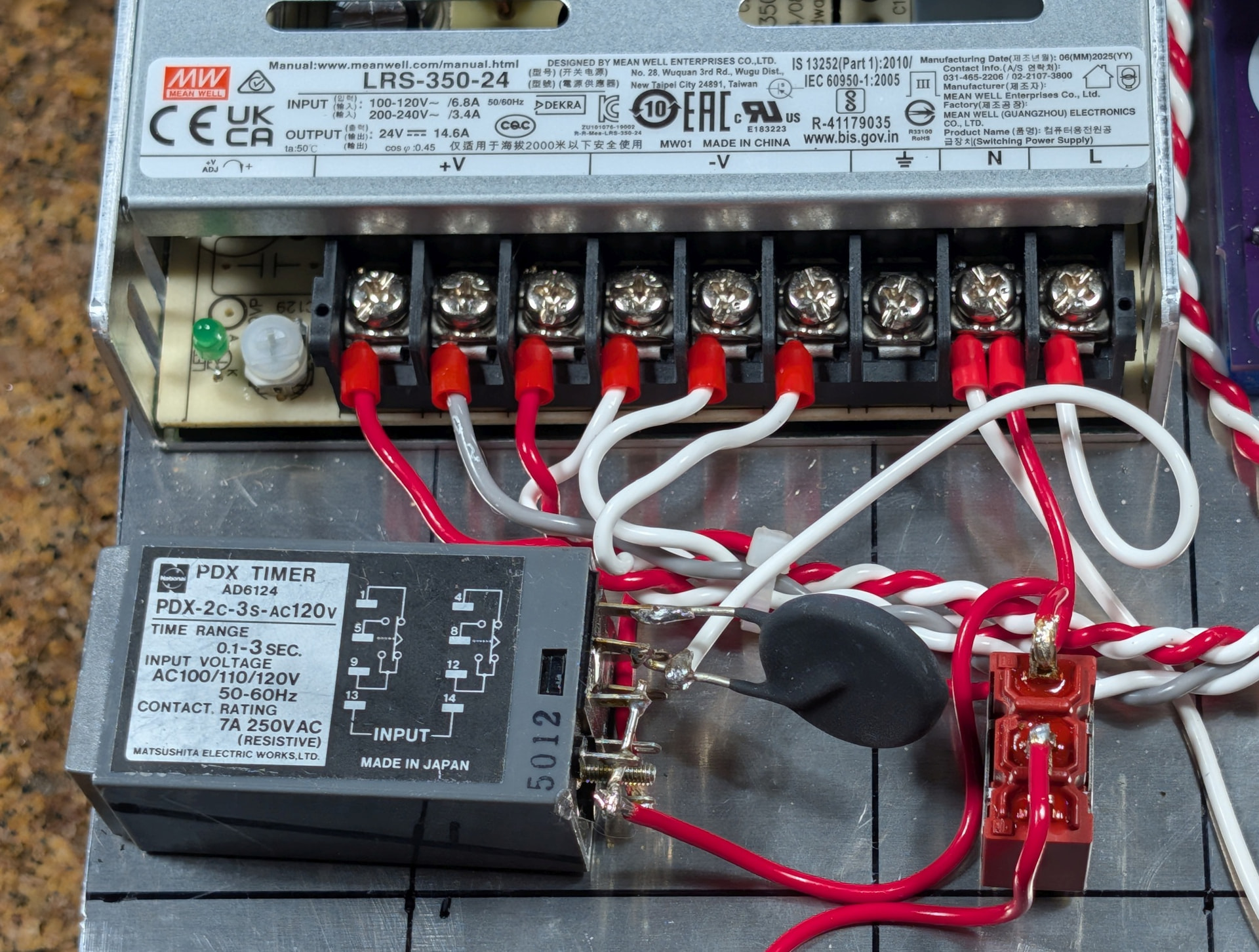
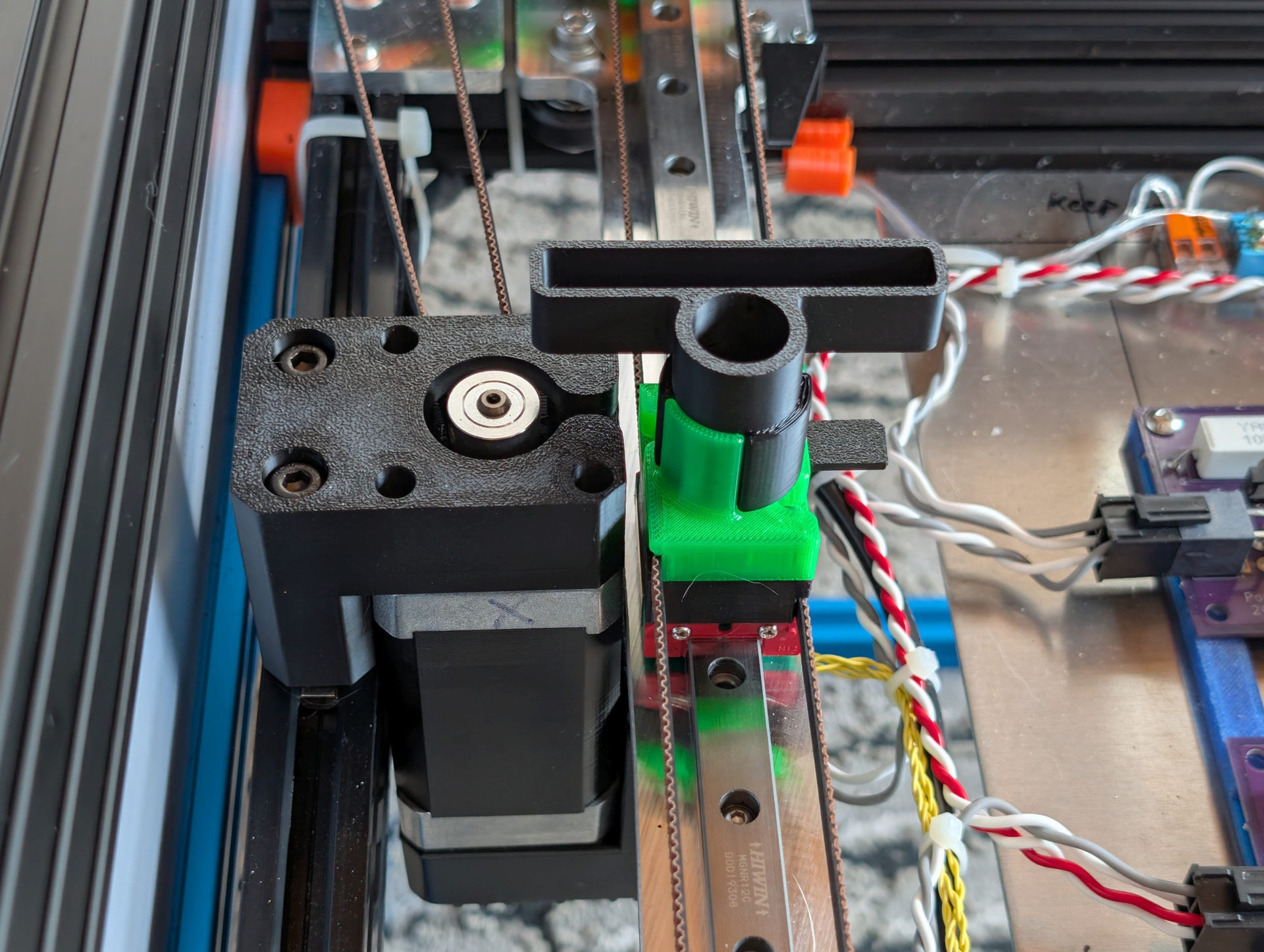
The mechanism is built on a 2040 v-slot frame that drops into a 2020 t-slot support frame that is slightly smaller than the glass top. The Y axis motion uses wheeled carriages that run in the v-slot, with a 12 mm linear guide used for the X axis. I used the same iHSV servomotors and Duet2 WiFi controller I used in Arrakis 2.0 because I had them handy. The mechanism is a stacked belt coreXY type using 3D printed concave pulleys that prevent squeaky noises. The pulleys use stacked F625 bearings. I used optical endstops. Drawing area is 465 x 1005 mm. All the electronics mount on an aluminum plate screwed to the bottom of the mechanism frame.
The sandbox is also made from 2040 v-slot with a white fake leather cloth covered 3/16” thick G10 fiberglass board fit into the lower slots, and LED strips fit into the upper slots. I painted a black frame on the underside of the glass top that just sits on top of the sandbox. The sandbox screws down onto four posts at the corners of the support frame. I added more LED strips (with a power switch) to the underside of the mechanism frame to light the floor with the same colors used on the top of the table.
The sides of the mechanism will be hidden by some 1/8” mirrored blue acrylic pieces that will fit into the slots in the 2020 t-slot support frame. I am planning to cut and install them tomorrow.
Here are a few photos:
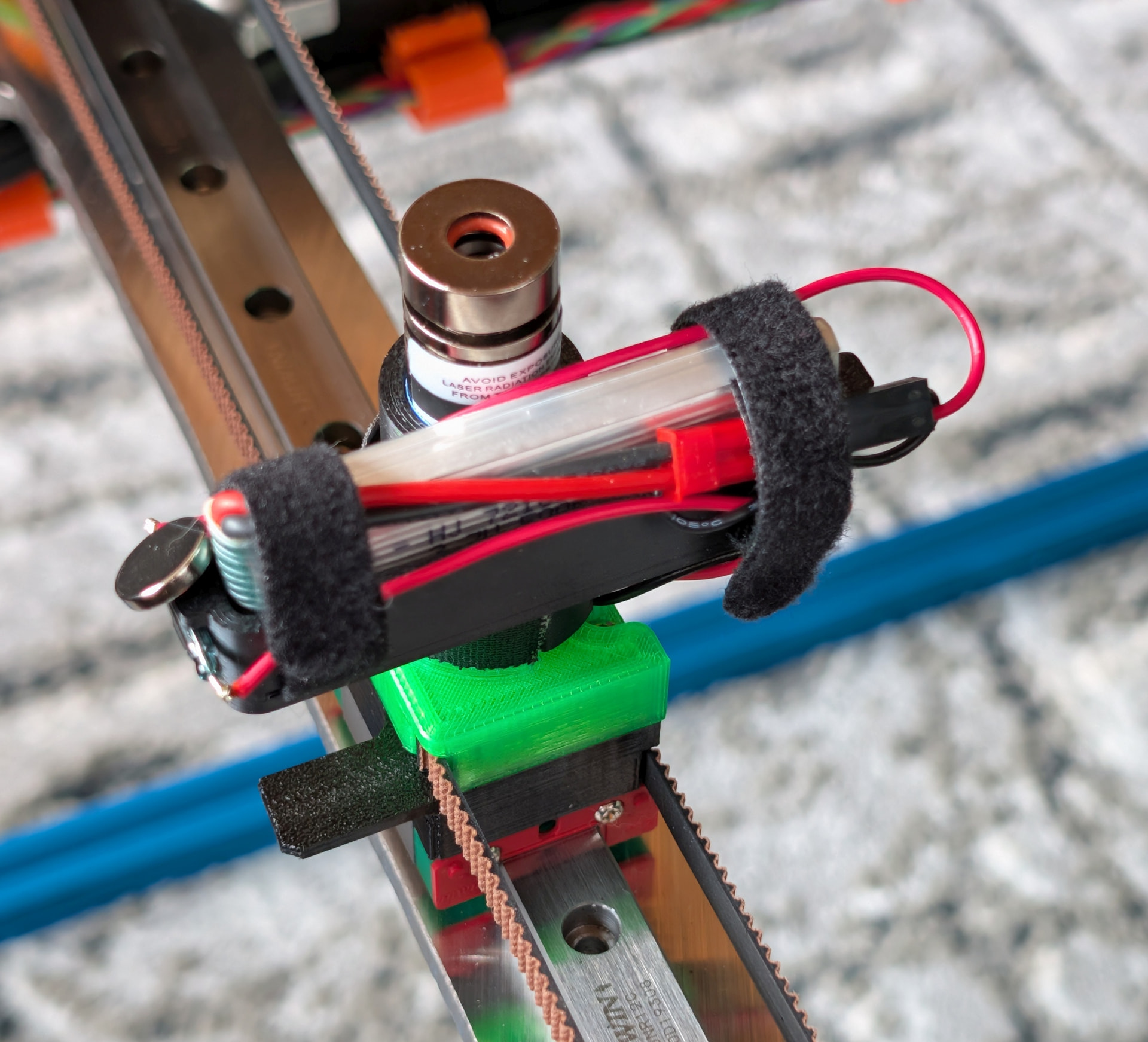
mechanism frame drops into the blue support frame. motors and 3D printed mounts Y axis carriage and corner pulleys twisted belt so that belt teeth only contact the drive pulley lower belt clamp with X=0 flag magnet carriage floor lights off floor lights on