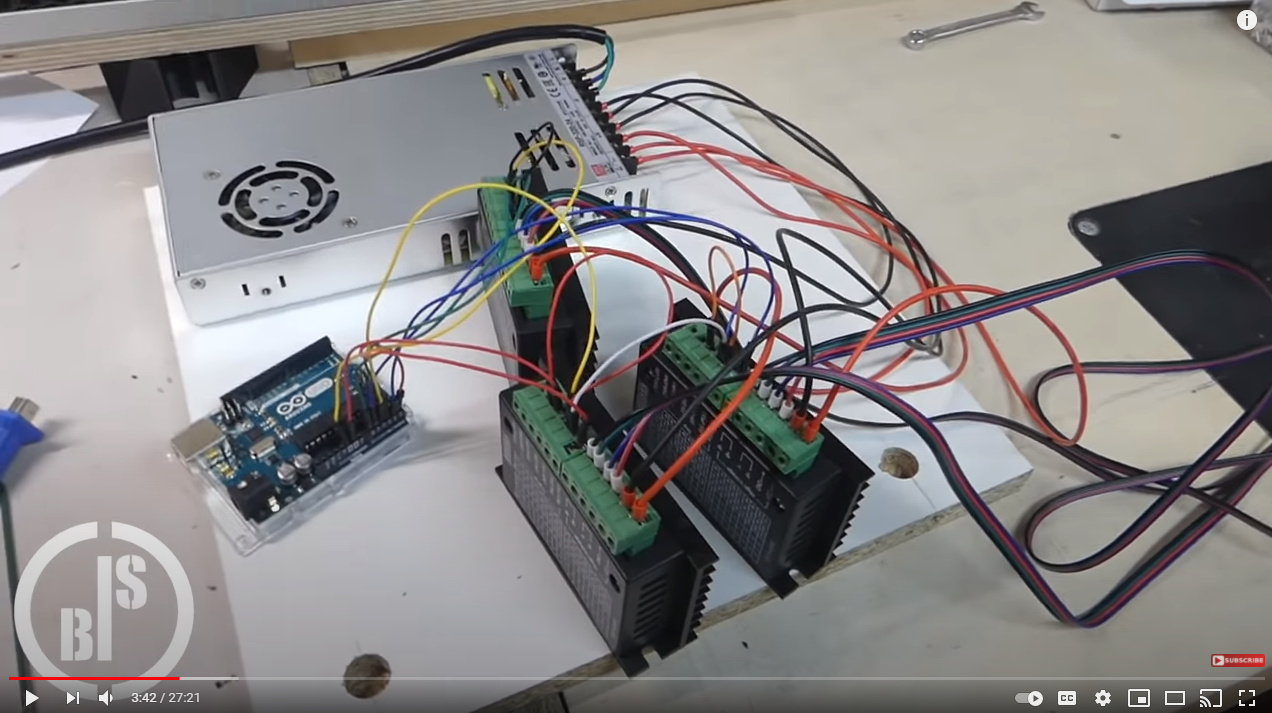
Hi all. I’m currently in the process of building a Primo and have started looking into the control electronics. I’m keen to buy parts with an upgrade path where possible. As a result, I’m thinking of using a vanilla Arduino Uno and pairing it with 3x DM556 micro-stepping drivers. This setup was successfully used by the YouTuber I SIMPLY BUILT IT. Has anyone here used a similar setup? Were your results good? Are there limitations to this setup?
The large drivers take the place of the step-stick style drivers or chips on the controllers most folks on the forums are using. What firmware are you planning to run? That will tell you which pins on the Arduino get connected to the various pins on the external drivers you’ve got.
Generally the amount of current the driver can get to the motor determines torque, which indirectly impacts max travel speeds and acceleration. I’m not familiar with the specifics of those drivers, but I’m guessing they can move more current than the Nema 17’s will need.
Thanks for the reply Tom.As you suggest, these drivers are over-specified. Nima 17 is at the bottom of their current range. I’ve actually purchased 5 Stepperonline DM542T parts instead. Essentially the same, just a bit smaller.
Still trying to work out how to add a new line without posting… shift is the magic button!
These drivers have variable current limits, run the motors quietly and have variable micro-stepping. I’m keen to machine small aluminium parts and so want something tuneable.
As for firmware, I’m (currently) intending to use a recent release of GRBL for either the Uno or Mega as I’m vaguely familiar with GRBL already. It looks like this now supports dual end-stops which should work out well for the MPCNC. It does sound like I’m going a bit off-piste from the community norm, but that nothing new for me. If there are others who’ve gone down a similar road ahead of me, I’d love to know what I’m letting myself in for! Failing that, I’ll make sure I post my trials and tribulations so others can learn from my multitudinous mistakes!