Hi All,
I recently finished building the Lowrider v4 with Jackpot V1 (ordered from v1e).
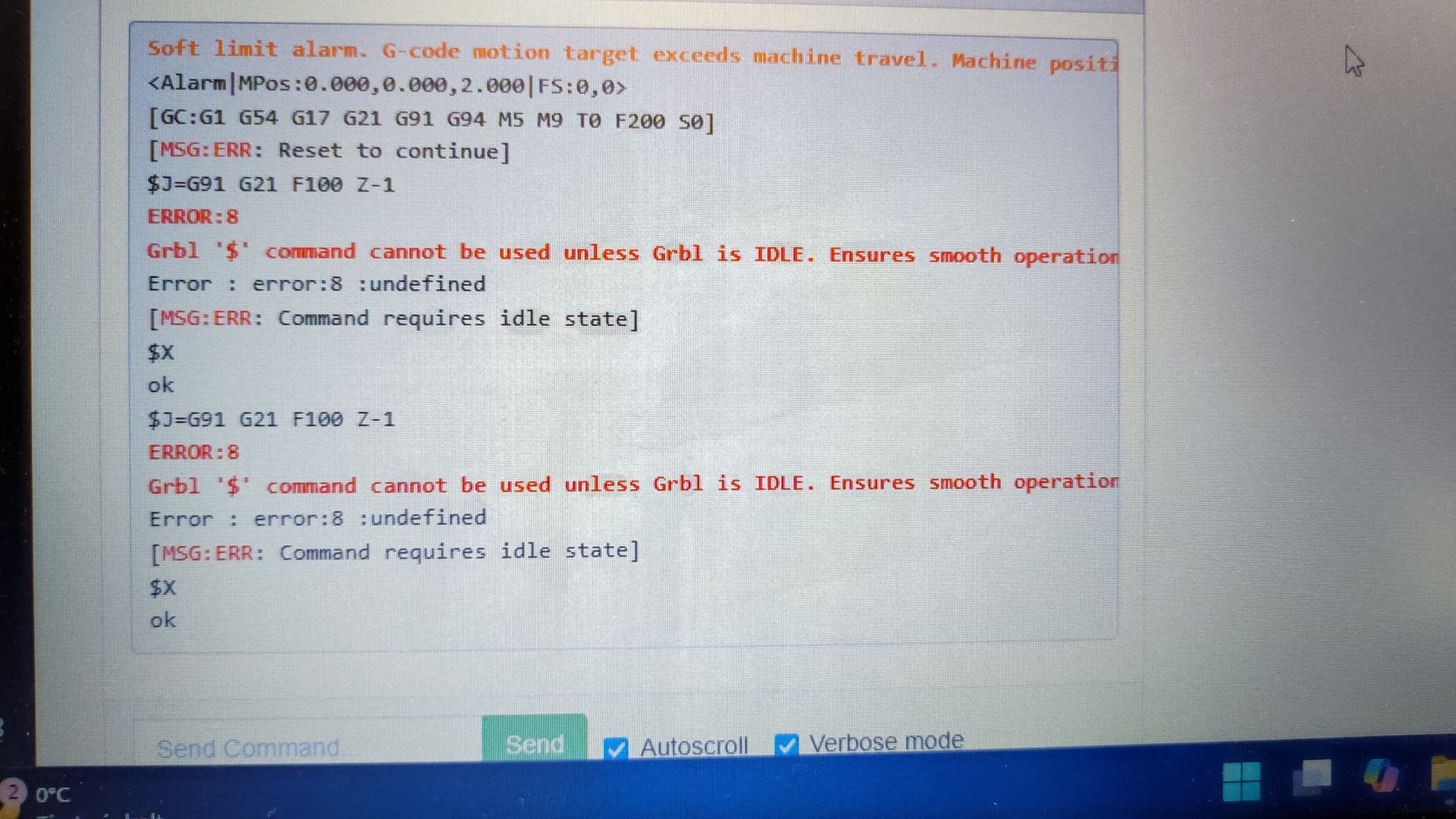
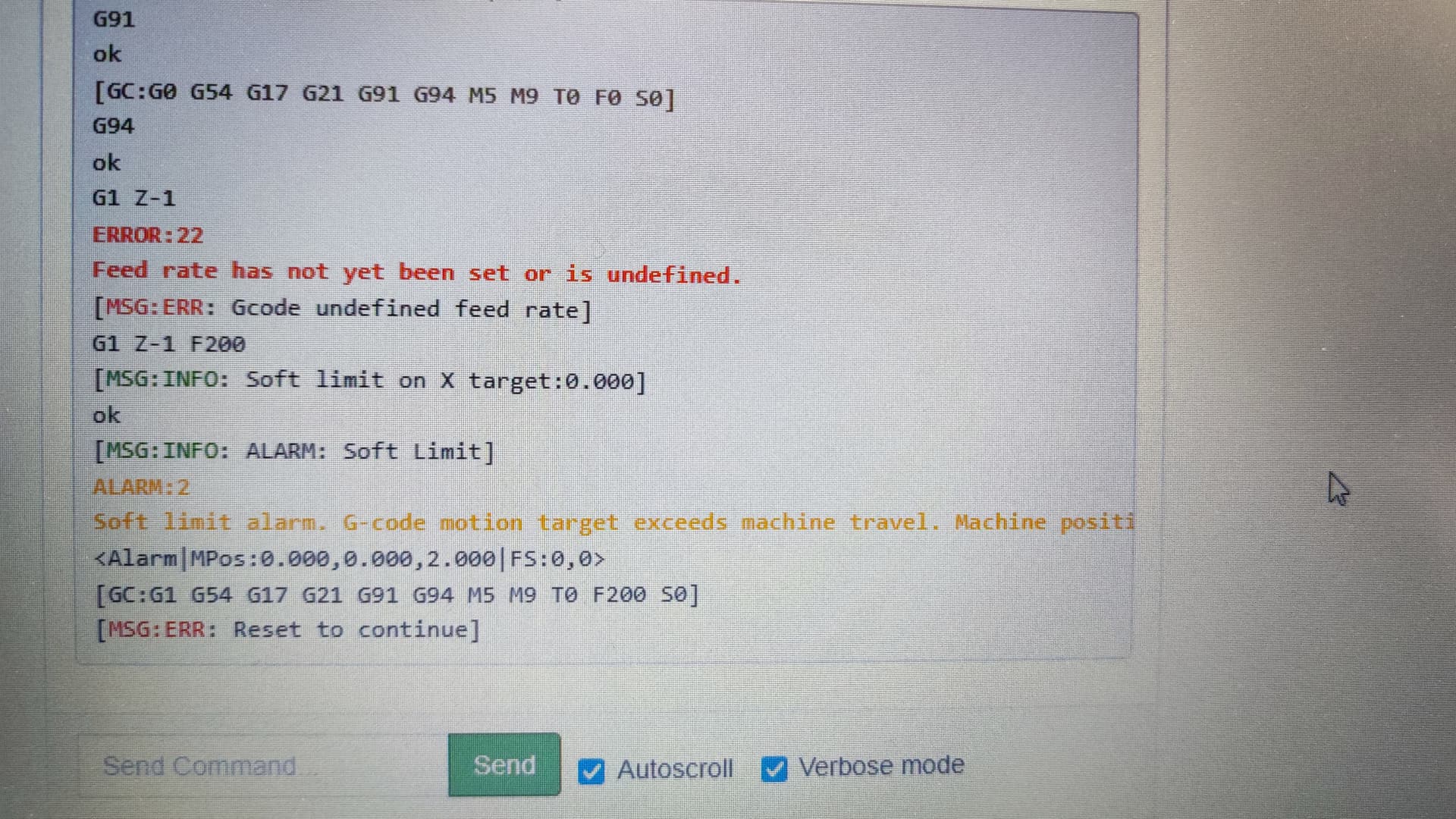
When I try to home the machine and then move it using manual G-codes, I get a soft limit alarm. After homing Z, I use the following G-codes:
G21
G91
G94
G1 Z-1 F200
And I get a soft limit alarm. The same happens on both axes. I think I might have misconfigured something because this was working fine earlier. I’ve tried using different Z values (e.g., -50), but I keep getting the soft limit alarm. However, I can still move the machine using the web UI (after reboot the jackpot), but these G-codes don’t work.
I made changes in the config to set the X and Y soft limits, and also turned on all hard limits. Nothing else has been changed.
- Could someone give me some guidance on what the problem could be?
- Also, when I get this soft limit alarm I can not do anything. I can’t reset it; I have to switch the Jackpot off and on again. Is there a better way to handle this? (this is a general problem, that I can’t use the webui after any alarm, even if I push the Clear Alarm icon/button)
Error message:
config.yaml
board: Jackpot TMC2209
name: LowRider
meta: 10-31-2024 RyanZ
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 2
dir_delay_us: 1
disable_delay_us: 0
segments: 12
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
cts_pin: NO_PIN
baud: 115200
mode: 8N1
passthrough_baud: 0
passthrough_mode: 8E1
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
min_pulse_us: 2
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
kinematics:
Cartesian:
axes:
shared_stepper_disable_pin: NO_PIN
shared_stepper_reset_pin: NO_PIN
homing_runs: 2
x:
steps_per_mm: 50.000000
max_rate_mm_per_min: 9000.000000
acceleration_mm_per_sec2: 200.000000
max_travel_mm: 1248.000000
soft_limits: true
homing:
cycle: 2
allow_single_axis: true
positive_direction: false
mpos_mm: 3.000000
feed_mm_per_min: 300.000000
seek_mm_per_min: 1500.000000
settle_ms: 500
seek_scaler: 1.100000
feed_scaler: 1.100000
motor0:
limit_neg_pin: gpio.25
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 4.000000
tmc_2209:
addr: 0
cs_pin: NO_PIN
uart_num: 1
step_pin: I2SO.2
direction_pin: I2SO.1
disable_pin: I2SO.0
r_sense_ohms: 0.110000
run_amps: 0.800000
hold_amps: 0.700000
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.800000
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
y:
steps_per_mm: 50.000000
max_rate_mm_per_min: 9000.000000
acceleration_mm_per_sec2: 200.000000
max_travel_mm: 2500.000000
soft_limits: true
homing:
cycle: 2
allow_single_axis: true
positive_direction: false
mpos_mm: 3.000000
feed_mm_per_min: 300.000000
seek_mm_per_min: 1500.000000
settle_ms: 500
seek_scaler: 1.100000
feed_scaler: 1.100000
motor0:
limit_neg_pin: gpio.33
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 4.000000
tmc_2209:
addr: 1
cs_pin: NO_PIN
uart_num: 1
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
r_sense_ohms: 0.110000
run_amps: 0.800000
hold_amps: 0.700000
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.800000
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
motor1:
limit_neg_pin: gpio.35
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 4.000000
tmc_2209:
addr: 3
cs_pin: I2SO.14
uart_num: 1
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
r_sense_ohms: 0.110000
run_amps: 0.800000
hold_amps: 0.700000
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.800000
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
z:
steps_per_mm: 200.000000
max_rate_mm_per_min: 1800.000000
acceleration_mm_per_sec2: 80.000000
max_travel_mm: 300.000000
soft_limits: false
homing:
cycle: 1
allow_single_axis: true
positive_direction: true
mpos_mm: 3.000000
feed_mm_per_min: 200.000000
seek_mm_per_min: 800.000000
settle_ms: 500
seek_scaler: 1.100000
feed_scaler: 1.100000
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 4.000000
tmc_2209:
addr: 2
cs_pin: NO_PIN
uart_num: 1
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
r_sense_ohms: 0.110000
run_amps: 0.800000
hold_amps: 0.700000
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.800000
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34
limit_all_pin: NO_PIN
hard_limits: true
pulloff_mm: 4.000000
tmc_2209:
addr: 3
cs_pin: I2SO.19
uart_num: 1
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
r_sense_ohms: 0.110000
run_amps: 0.800000
hold_amps: 0.700000
microsteps: 8
toff_disable: 0
toff_stealthchop: 5
use_enable: false
run_mode: StealthChop
homing_mode: StealthChop
homing_amps: 0.800000
stallguard: 0
stallguard_debug: false
toff_coolstep: 3
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
fault_pin: NO_PIN
estop_pin: NO_PIN
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
probe:
pin: 'gpio.36:low'
toolsetter_pin: NO_PIN
check_mode_start: true
hard_stop: false
macros:
startup_line0:
startup_line1:
Macro0:
Macro1:
Macro2:
Macro3:
after_homing:
after_reset:
after_unlock:
start:
must_home: false
deactivate_parking: false
check_limits: true
parking:
enable: false
axis: Z
target_mpos_mm: -5.000000
rate_mm_per_min: 800.000000
pullout_distance_mm: 5.000000
pullout_rate_mm_per_min: 250.000000
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: NO_PIN
digital3_pin: NO_PIN
digital4_pin: NO_PIN
digital5_pin: NO_PIN
digital6_pin: NO_PIN
digital7_pin: NO_PIN
user_inputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
digital4_pin: NO_PIN
digital5_pin: NO_PIN
digital6_pin: NO_PIN
digital7_pin: NO_PIN
arc_tolerance_mm: 0.002000
junction_deviation_mm: 0.010000
verbose_errors: true
report_inches: false
enable_parking_override_control: false
use_line_numbers: false
planner_blocks: 32
Why I turned on hard limits**:** I made a mistake. I homed Z, then I wanted to move it down, but I entered the wrong G-code: G0 Z60. I forgot the minus sign, so it started moving up instead. The part that holds the Z limit switches was not tight, and the whole beam somehow went past them. It made a bad sound. I cut the strut, assembled it, and after that, I decided to turn on the hard limits so it can’t go past those switches. My soft limit problem appeared sometime after this. (Also, I’m worried that the coupler may have come loose or slipped out of place, but verifying this would require fully disassembling the motor, which I haven’t done.)
Thank You For Your Help