Hi all. I have my lr3 built and moving.
im able to access the jackpot ui fine and all seems well. Im having a little problem wrapping my head around next steps. im super busy at work and its using up all my reserve IQ points LOL. specifically one thing I’m aware I need to do is I need to set my table size in fluid. I made a 4x6’ bed. then plan to tram and run some tests.
any help you can offer or point me to a list of next steps would be greatly appreciated.
what program or app is best to edit parameters such as table size?
id love to sort it out in the next few days as I have a nice work project I could do on the machine. ( I do have backup) but doing it on the lowrider would be fun.
I have been watching Doug’s great videos on the jackpot controller but im missing something. its those spent IQ points.
The jackpot doesn’t care what the table size is you don’t need to set it.
One of the best options to start with for generating gcode to cut with is estlcam. This is because there’s a good guide for it in the docs and it’s free to install and use.
what failsafe prevents it from running off the back edge of the table or hitting the belt adjusters really since there aren’t limit switches on y max side? other than just not letting the file size exceed the table size.
Yep, don’t try and cut something bigger than your bed.
If you do go too far you’ll hit the end and it’ll sound terrible… but not do any damage to anything, the steppers will just skip. It’s just magnets inside them, you’re not going to strip any gears
Ok i thought i recall something about fluid having soft stops that had to be set in lieu of limit switches
I may be mistaken
Thank you.
That’s an option but not a requirement and if you ever alter your 0,0 location using G92 they’ll be ignored anyway
I don’t think that’s accurate. Soft limits should still work on machine coordinates in FluidNC regardless of G10 or G92 commands
well some good news I replaced a limit switch that had lost its lever. I bought the old recommended switches with the red wheels. they seem more robust…then I did bed squaring test and and initial bed xy square is within 1/32nd and the z gantry is at least as good side to side quite happy with that. next to tram the spindle
Dreyfus is correct here. I would add though, that I hate the grinding collision sound of when I accidentally nudge the LowRider too far in any axis, and I’m very pleased to have my table’s “max_travel_mm” attributes edited in my config.yaml, and also have hard_limits enabled (5 places, one per motor) and my soft_limited (3, one per axis).
You can do all this within the WebUI - go to the tab called “FluidNC,” and then click on “Config Items.” There you can enter not only the “max_travel_mm” per each axis, but also enable the hard and soft limits.
Please note that after editing there, you need to go back to the main tab, and save using the macro button that Ryan included.
Also, you can download a copy of your config.yaml to your computer (using the webUI) and edit a copy there, and then upload it back to the Jackpot using the WebUI.
I made several videos that may help on this:




This is correct.
This is actually not correct. In my careful testing, offsets do not hinder the hard limits and soft limits from working, and this was so regardless of whether my 0,0 XY offset was done with either G92 or G10 L20.
Mike is correct. As I said, I’ve tested carefully, and the hard limits / soft limits work no matter whether I set an offset with either G92 or G10. I’m quite pleased about that.
Hard limits are to respect where your end stops are located, as they were detected during homing, and soft limits respect the table’s max travel distances in any given axis, based on either the machine’s homed 0,0,0 (i.e. key off your end stops) or whatever 0,0,0 was assumed at boot up, if you don’t have end stops. Since the LowRider has end stops baked into the design, “if you got 'em, use 'em.”
FluidNC does not require either hard limits or soft limits to be enabled, but since I’ve done careful testing and know that the normal workflow of setting a “work offset” does not hinder the hard and soft limits from working, and since they are working great for me, I know of no reason not to go ahead and enable them.
Also, I forgot to mention regarding this:
You can edit the config.yaml using Notepad, or any text editor, or any code editor, such as Visual Studio Code, etc. You can also use the same programs to edit GCode files to serve as macros (you can create macro buttons on the main tab of the WebUI, and point them to GCode files you edited and uploaded onto the Jackpot’s ESP flash memory.)
Congrats on your machine being so close to square and tram! Nice!
Just to throw this out there for anyone that doesn’t know…
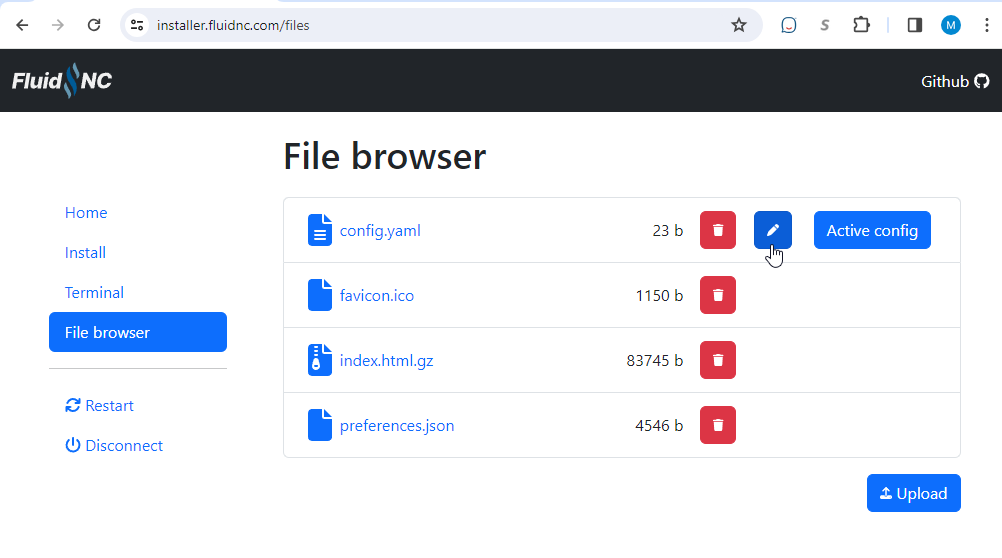
If you happen to be connected with USB, the FluidNC installer website has a nice interface for making changes to the config.

Huh, every days a school day. I wonder how that works, if I move halfway along my X axis and set that point to x=0 is the absolute 0,0 also kept somewhere else to keep the limits right?
You are almost always right, but just this once. ![]()
Yes, if you look at the WebUI for the Jackpot, there are two sets of DRO’s. The DRO on the top row says Xw and Yw (where “w” means “workspace” I think) and the DRO on the bottom row says Xm and Ym (where “m” stands for “machine”). So it’s actually keeping track of both!
thank you all for the great information