Hello all. I’ve messed with 3D printing for years but am brand new to CNC.
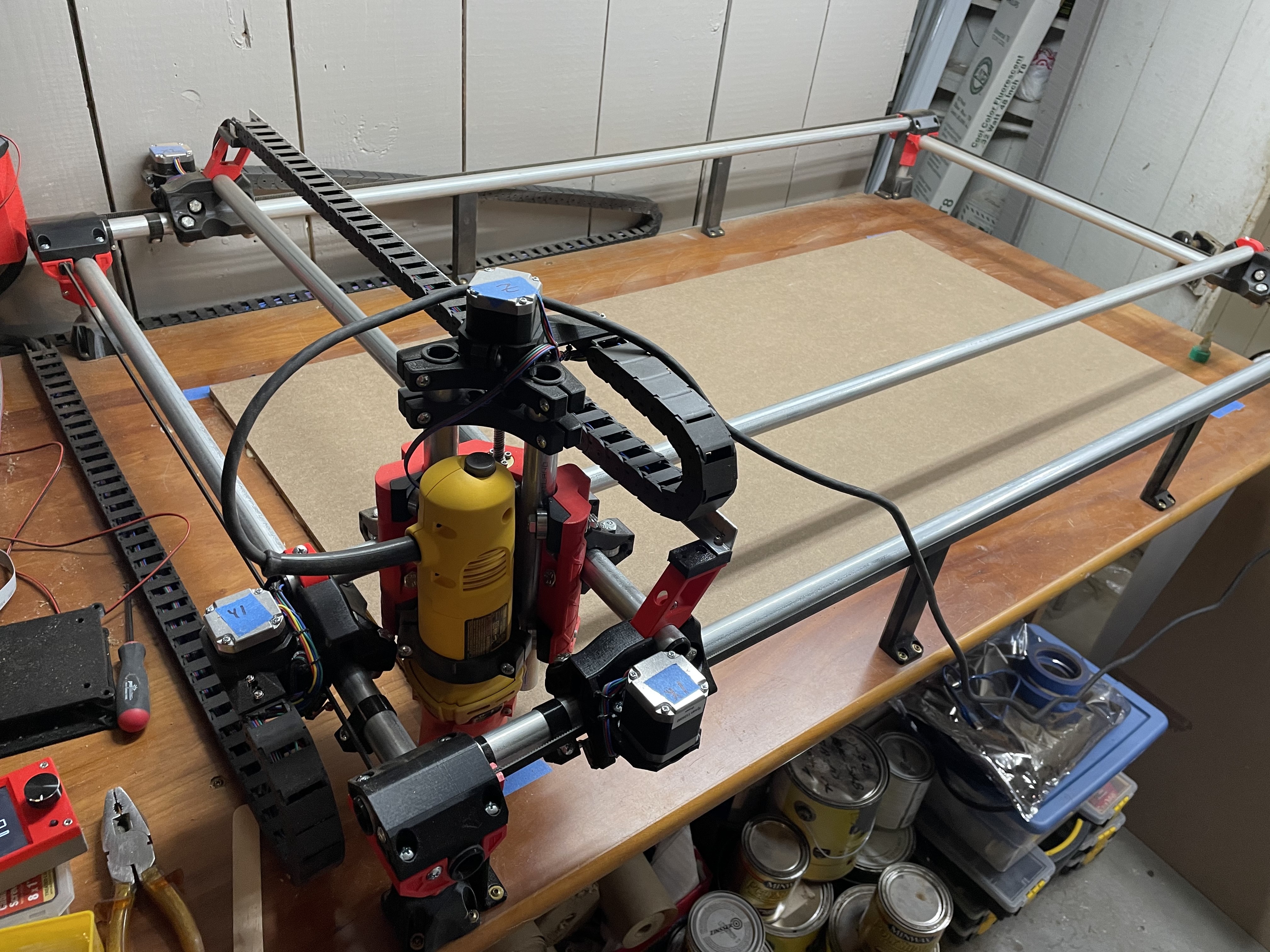
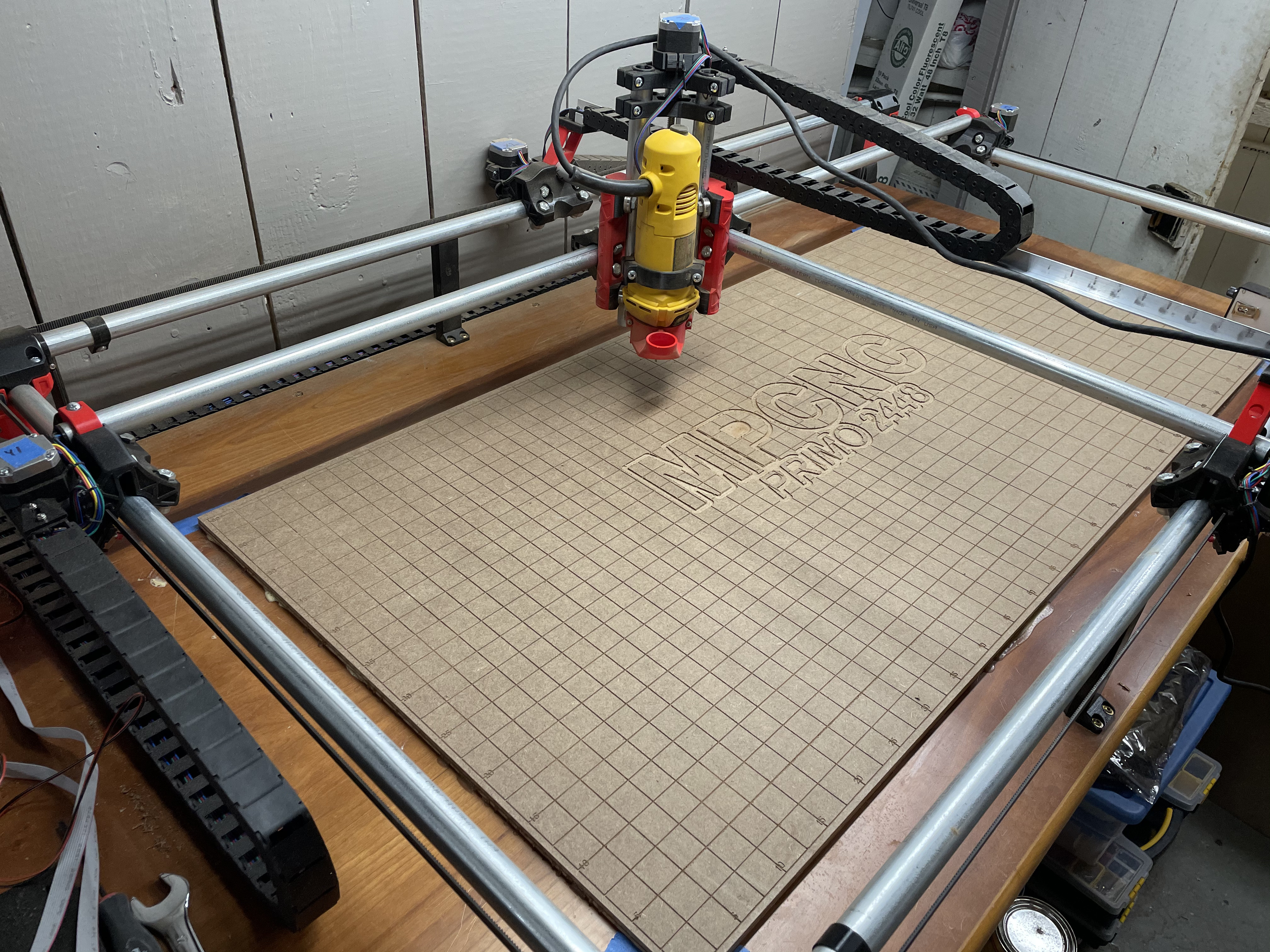
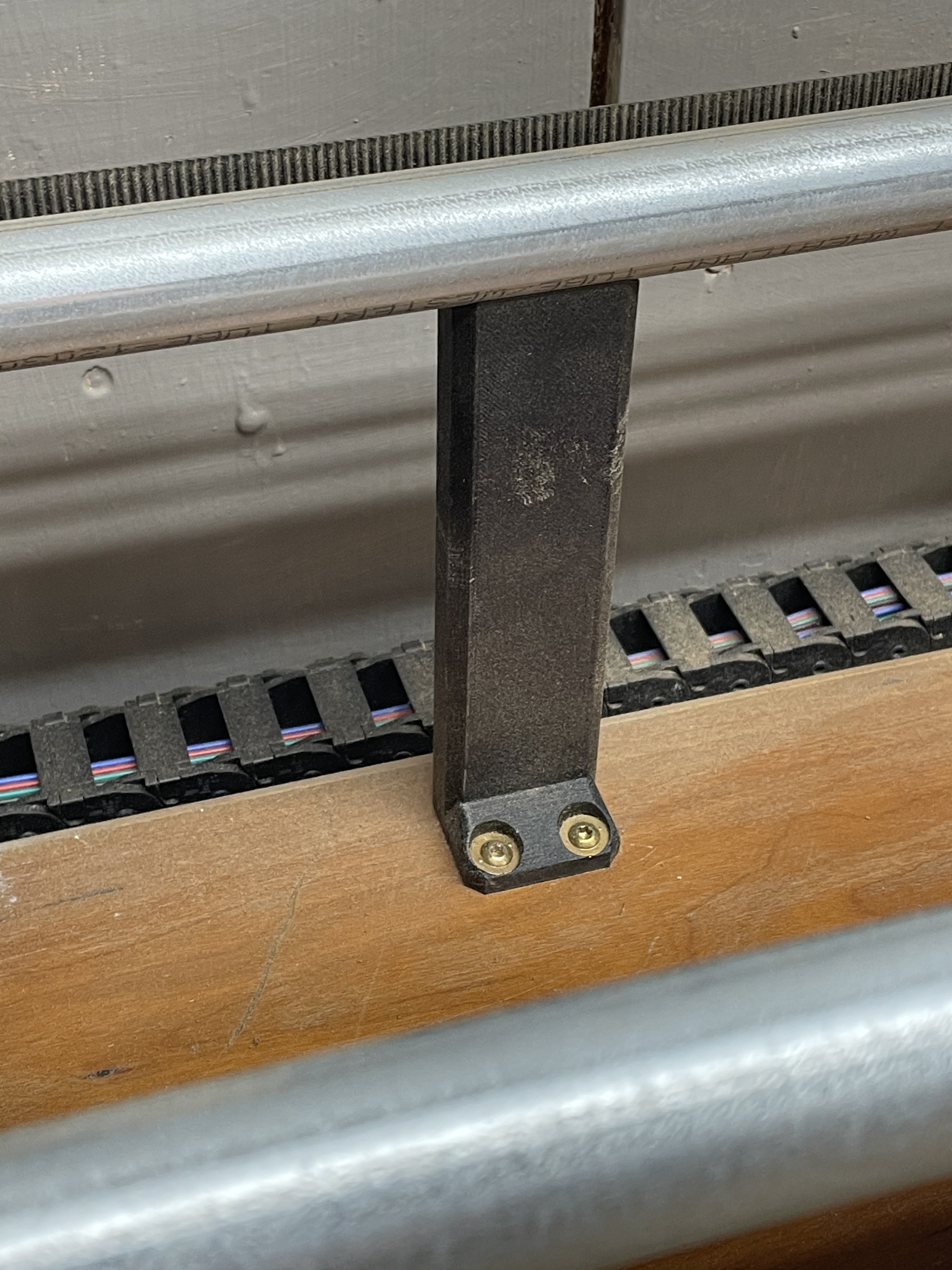
I just completed the build of a primo. The size is 3x5 feet (I know, large!), with a usable space of 2x4 feet. The Z height is 4”. I used some mid span supports but it seems to be of limited use. This will mostly be cutting wood.
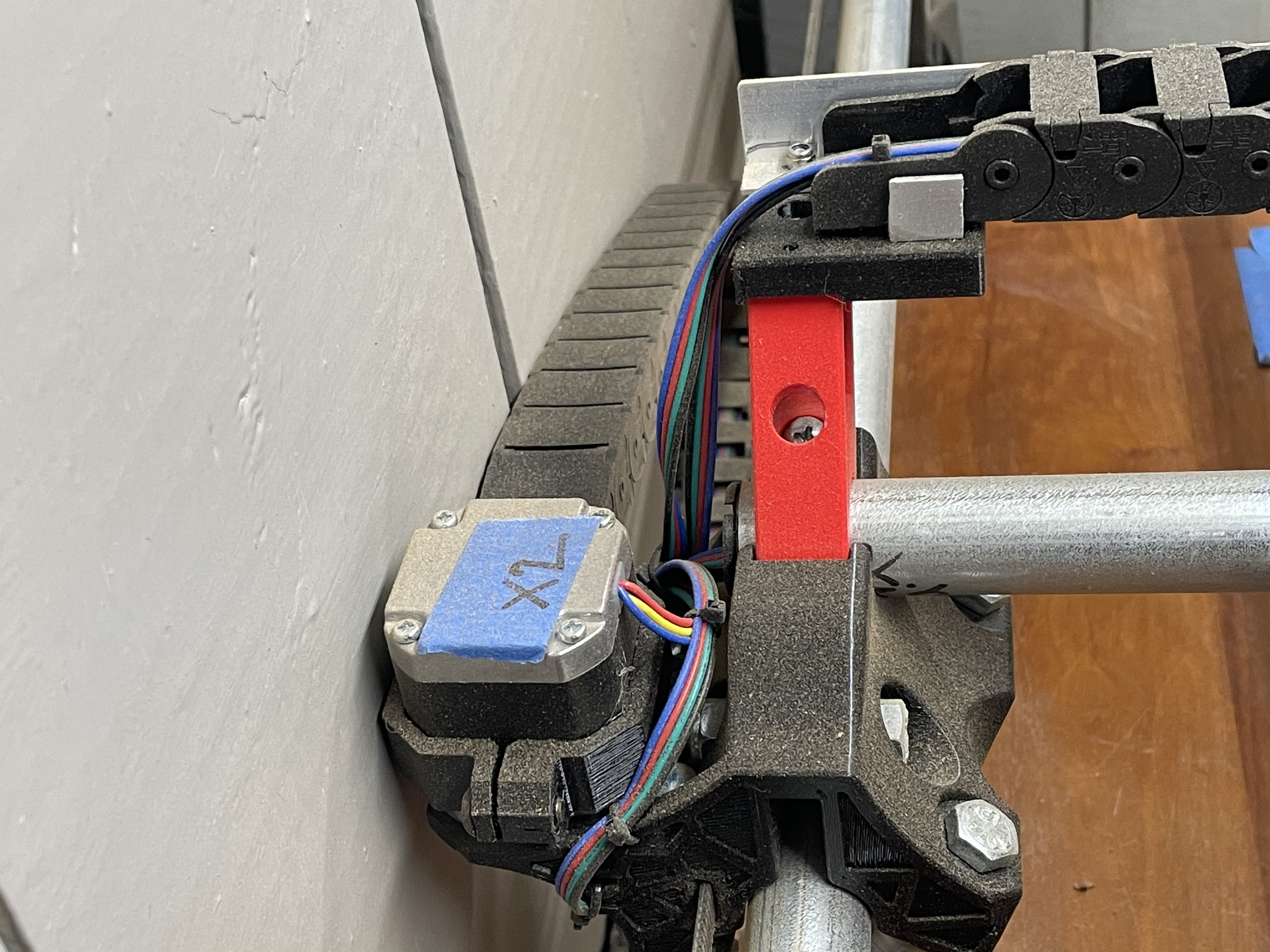
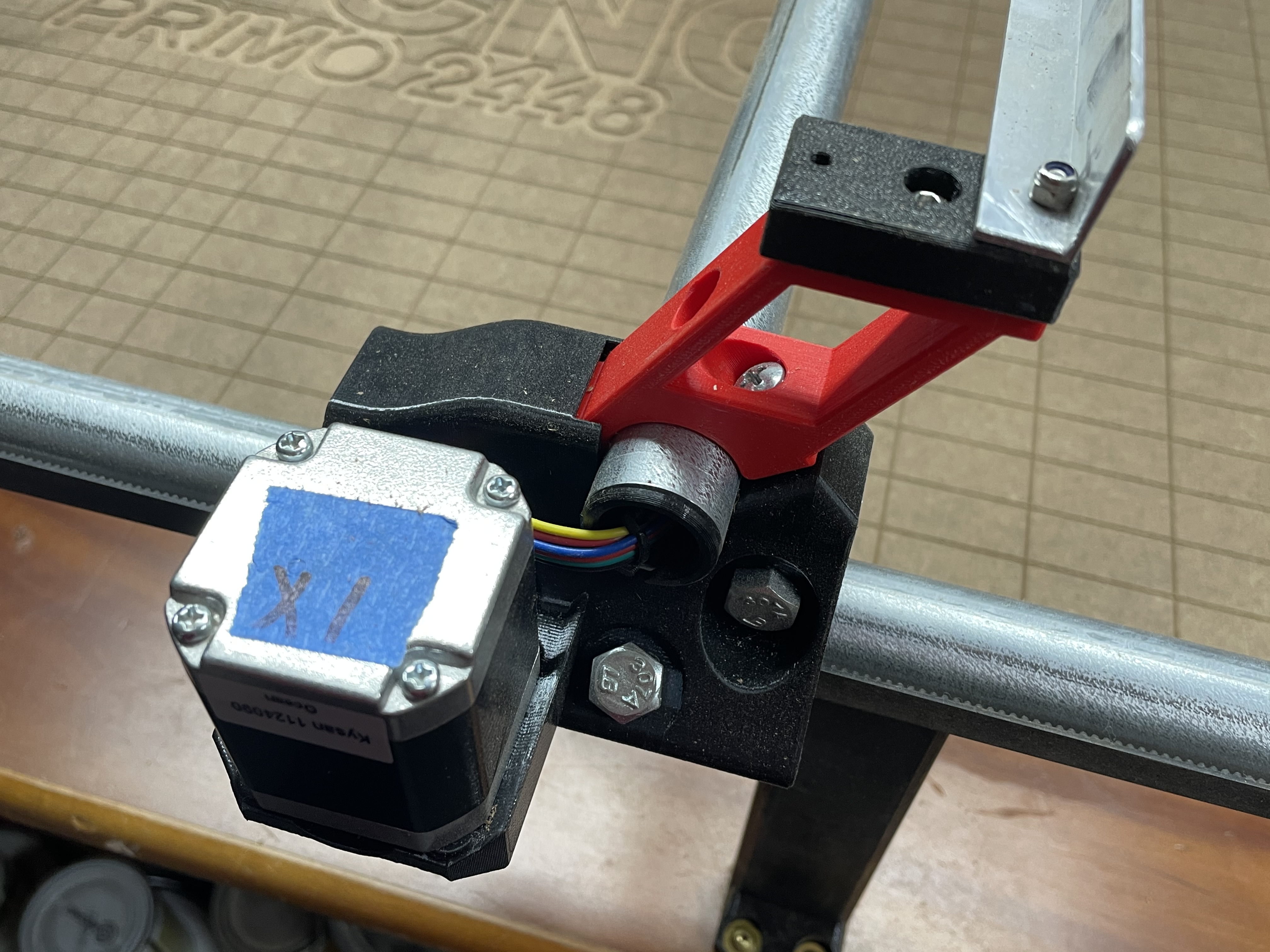
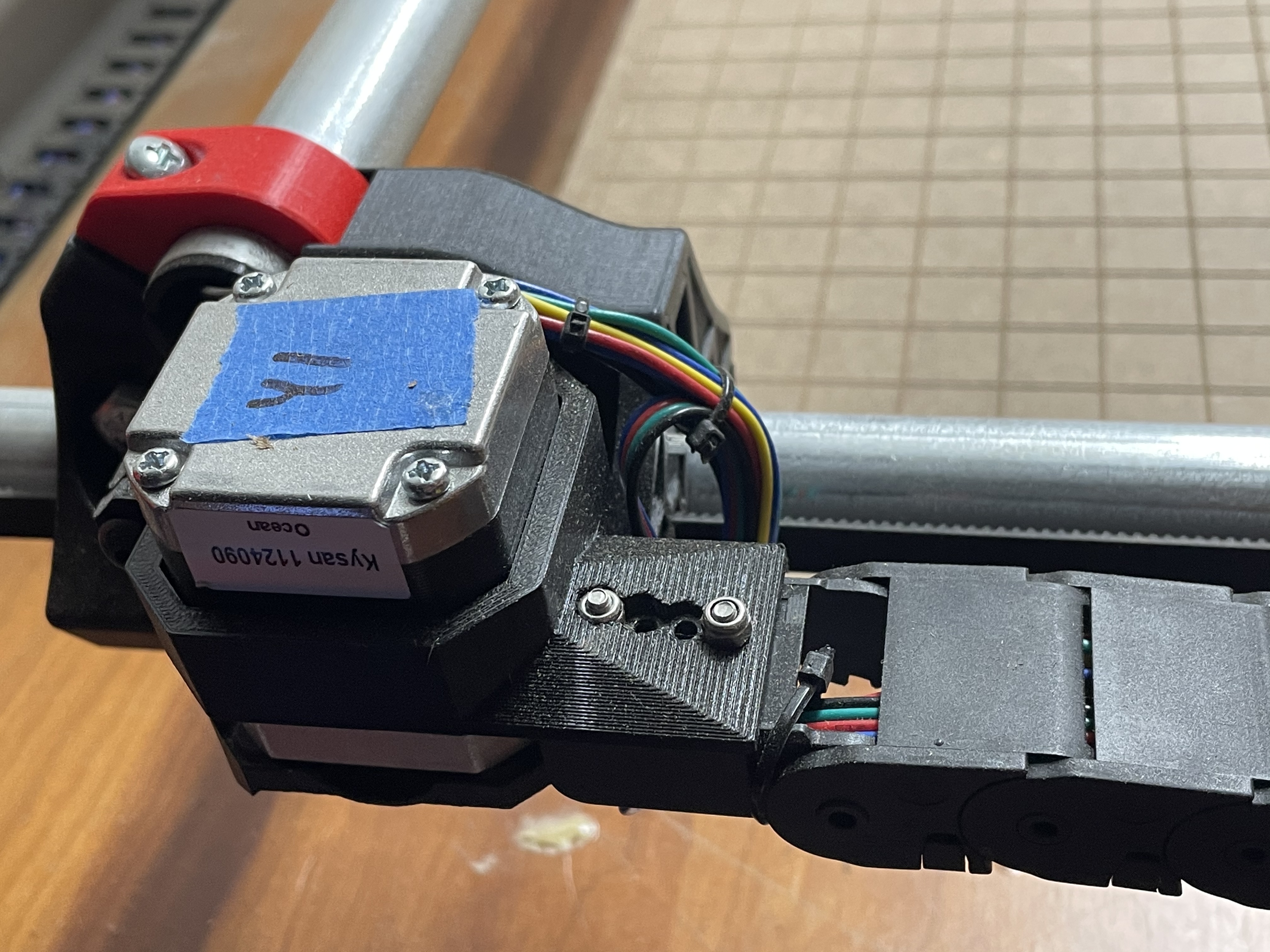
Electronics are BTT SKR 1.4 Turbo with TMC2290 drivers, and I implemented dual end stops on this. I also added a z-max limit switch to home to. I did this, in conjunction with homing to x and y min position and soft end stops, in order to limit the number of ways in which the machine can tear itself apart. Firmware is most recent marlin (2.0.7.1 I think) with my own config (happy to share if that helps anybody)
Cable management is done using cable drag chains, still figuring out how I want to route the main power and vacuum hose.
What’s left to do is an enclosure to contain the dust, a dust boot, and it suffers from really jerky movement still on curves, which seems to be marlin related.
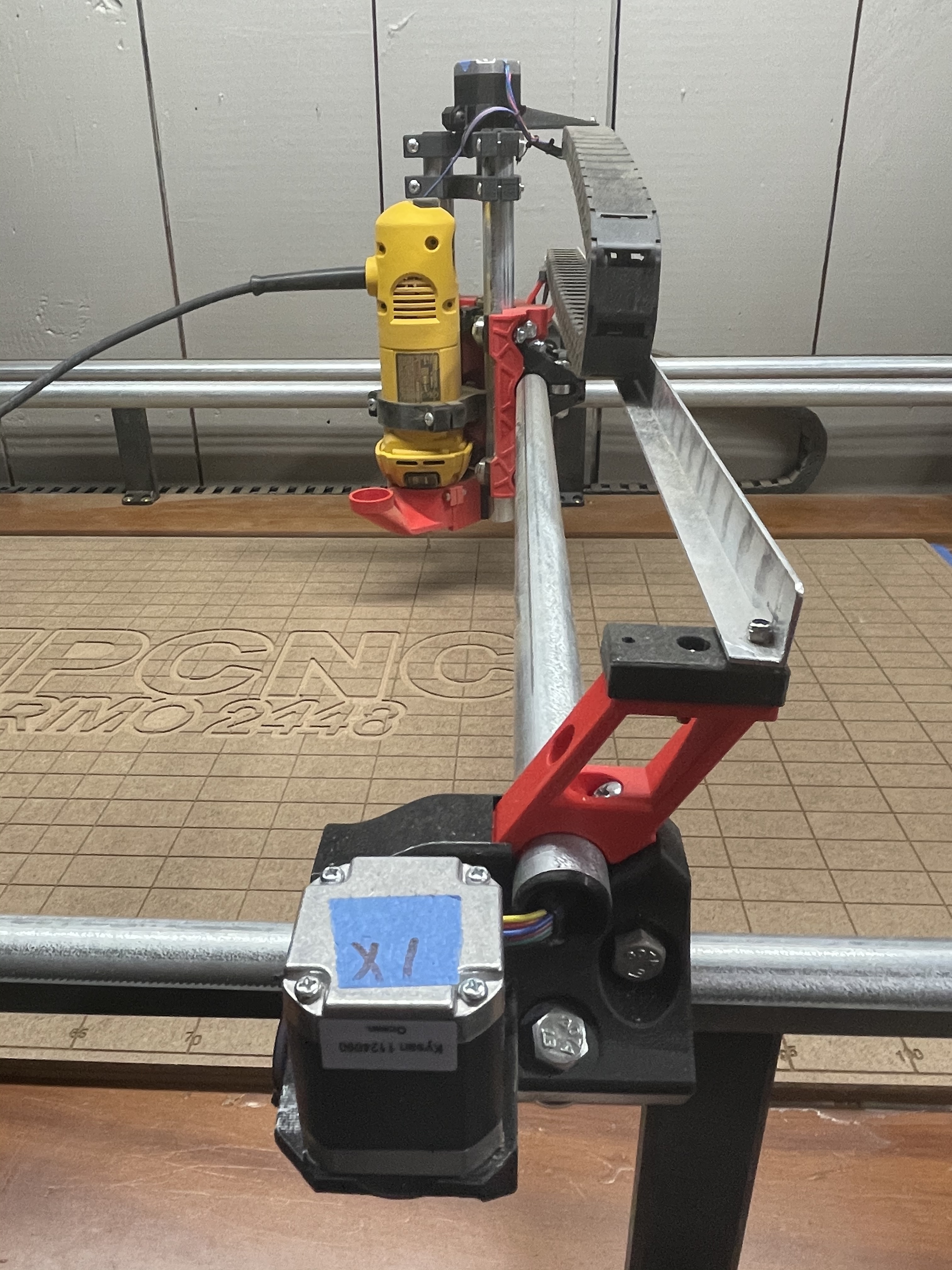
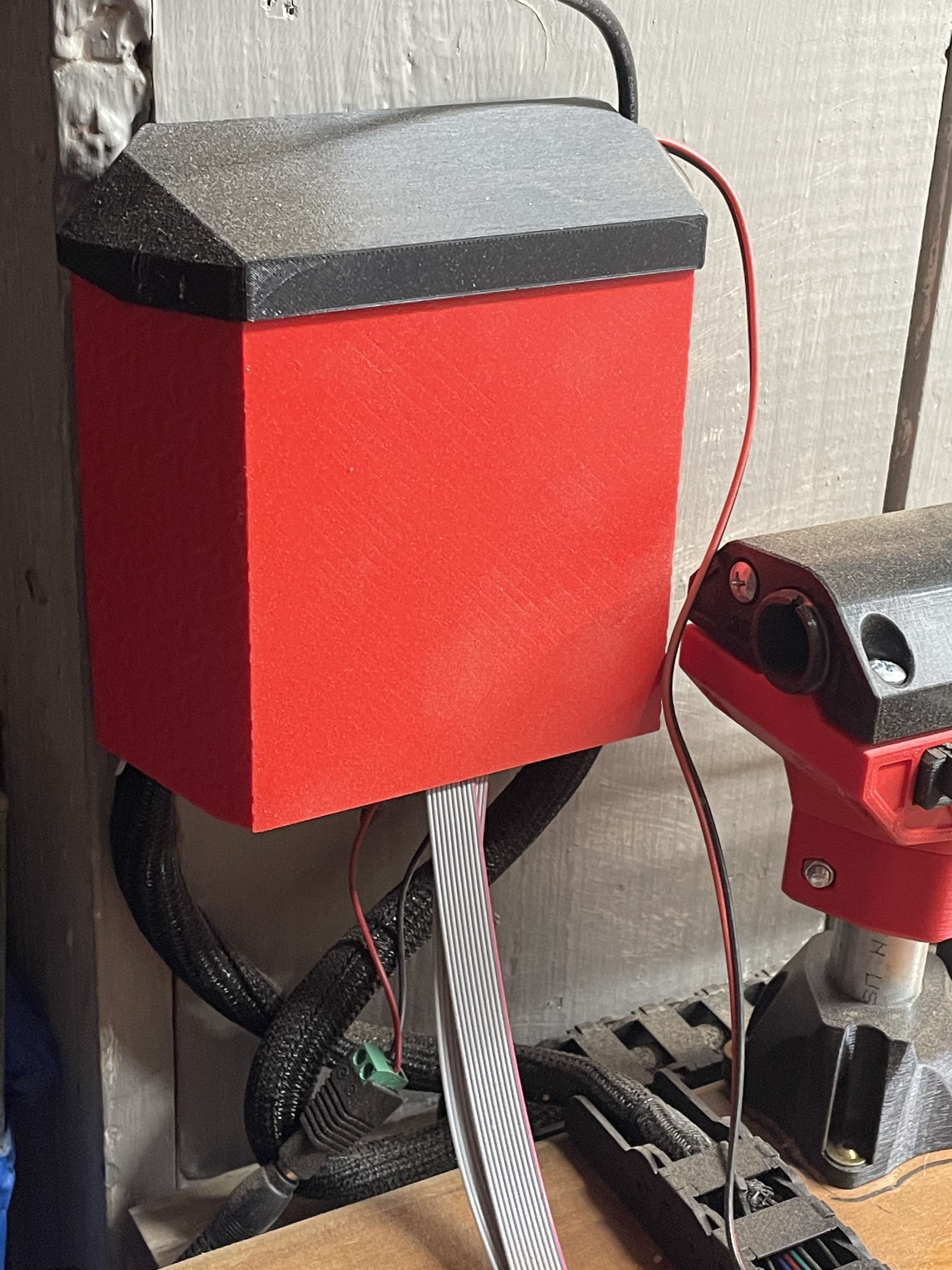
A few more pictures of my solution for the drag chain mounts and supports, mid span support, and my modified SKR box for the turbo. I am still deciding where to mount the controller lcd and emergency stops.
Turning arcs on in your CAM package should solve the jerking. Or try basing your firmware off our nightly firmware builds. I just did some testing and sorted that out.
Cool build, welcome to the crew!
The mid-span supports will support the outer rails, but they don’t really do anything for the two tubes that carry the gantry. So perhaps a little less sag in the outer supports, but i think it’s of limited value. It’s just the reality/limitation/tradeoff of this design.
I moved mine up to 2 foot by 4 today and did mid supports. I ran some tests and it doesnt seem too bad so far, but I only do wood so hopefully it’s not a major issue. I see how it can get out of square easier, so I install some hard stops so I can square the gantry before cutting.
Yep, this is why I ended up with implementing dual end stops: repeatable squaring. I have soft end stops enabled so there’s the added bonus of having less chance of the machine moving beyond its physical limits.