@jeyeager alle the errors occured on different attemps.
I’m not refreshing the UI, and the UI is open only on one device. I just started the job and let it run without any interference.
I got a few examples:
- I started the jackpot, connected to wifi, the WebUI popped up, but before I could interact, the starting procedere stopped, lost connection and I coppied this from starting procedere:
$SS
<Idle|MPos:0.000,0.000,0.000|FS:0,0|WCO:0.000,0.000,0.000>
[MSG:INFO: FluidNC v3.9.1 https://github.com/bdring/FluidNC]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.7-dirty]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config.yaml]
[MSG:INFO: Machine LowRider]
[MSG:INFO: Board Jackpot TMC2209]
[MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21]
[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
[MSG:INFO: Stepping:I2S_STATIC Pulse:2us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
[MSG:INFO: User Digital Output: 0 on Pin:gpio.26]
[MSG:INFO: User Digital Output: 1 on Pin:gpio.27]
[MSG:INFO: Axis count 3]
[MSG:INFO: Axis X (0.000,800.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
[MSG:INFO: X Neg Limit gpio.25]
[MSG:INFO: Axis Y (0.000,1600.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
[MSG:INFO: Y Neg Limit gpio.33]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
[MSG:INFO: Y2 Neg Limit gpio.35]
[MSG:INFO: Axis Z (0.000,100.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110]
[MSG:INFO: Z Pos Limit gpio.32]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
[MSG:INFO: Z2 Pos Limit gpio.34]
[MSG:INFO: X Axis driver test passed]
[MSG:INFO: Y Axis driver test passed]
[MSG:INFO: Y2 Axis driver test passed]
[MSG:INFO: Z Axis driver test passed]
[MSG:INFO: Z2 Axis driver test passed]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1]
[MSG:INFO: AP started]
[MSG:INFO: WiFi on]
[MSG:INFO: Captive Portal Started]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
[MSG:INFO: Flood coolant gpio.2]
[MSG:INFO: Mist coolant gpio.16]
[MSG:INFO: Probe gpio.36:low]
ok
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,100>
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
<Idle|MPos:0.000,0.000,0.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,100>
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,90>
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,80>
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,60>
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,30>
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,10>
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,10>
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:101,100,10>
[MSG:ERR: Channel device rejected config]
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:102,100,10>
- I restarted the jackpot, everting seemed ok, I typed $SS and got this:
ok
$SS
<Idle|MPos:0.000,0.000,0.000|FS:0,0|WCO:0.000,0.000,0.000>
[MSG:INFO: FluidNC v3.9.1 https://github.com/bdring/FluidNC]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.7-dirty]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config.yaml]
[MSG:INFO: Machine LowRider]
[MSG:INFO: Board Jackpot TMC2209]
[MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21]
[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
[MSG:INFO: Stepping:I2S_STATIC Pulse:2us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
[MSG:INFO: User Digital Output: 0 on Pin:gpio.26]
[MSG:INFO: User Digital Output: 1 on Pin:gpio.27]
[MSG:INFO: Axis count 3]
[MSG:INFO: Axis X (0.000,800.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
[MSG:INFO: X Neg Limit gpio.25]
[MSG:INFO: Axis Y (0.000,1600.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
[MSG:INFO: Y Neg Limit gpio.33]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
[MSG:INFO: Y2 Neg Limit gpio.35]
[MSG:INFO: Axis Z (0.000,100.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110]
[MSG:INFO: Z Pos Limit gpio.32]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
[MSG:INFO: Z2 Pos Limit gpio.34]
[MSG:INFO: X Axis driver test passed]
[MSG:INFO: Y Axis driver test passed]
[MSG:INFO: Y2 Axis driver test passed]
[MSG:INFO: Z Axis driver test passed]
[MSG:INFO: Z2 Axis driver test passed]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1]
[MSG:INFO: AP started]
[MSG:INFO: WiFi on]
[MSG:INFO: Captive Portal Started]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
[MSG:INFO: Flood coolant gpio.2]
[MSG:INFO: Mist coolant gpio.16]
[MSG:INFO: Probe gpio.36:low]
ok
<Idle|MPos:0.000,0.000,0.000|FS:0,0|Ov:100,100,100>
- Then I just homed and jogged the machine, it stopped and the gantry fell down, the ALARM3 message showed up, the wifi showed still connected, this is what showed in the feed, I shortened it, it kept going on:
<Jog|MPos:0.000,155.780,100.000|FS:3000,0|Ov:100,100,100>
$J=G91 G21 F500 Z-10
ok
<Jog|MPos:0.000,300.000,99.925|FS:500,0>
[MSG:INFO: ALARM: Abort Cycle]
ALARM:3
Reset while in motion. Machine position is likely lost due to sudden halt. Re-homing is highly recommended.
$J=G91 G21 F500 Z-10
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,100,100>
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,100,100>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,5,100>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,5,100>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,5,100>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:101,5,100>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:103,5,100>
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,100,100>
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,100,100>
[MSG:ERR: Channel device rejected config]
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
[MSG:ERR: Channel device rejected config]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:135,100,81>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:139,100,71>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:136,100,90>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:142,100,21>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:135,100,80>
[MSG:INFO: Check door]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:148,100,100>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:158,100,90>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:104,100,10>
[MSG:ERR: Channel device rejected config]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[MSG:ERR: Channel device rejected config]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:104,5,50>
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[MSG:ERR: Channel device rejected config]
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[MSG:ERR: Channel device rejected config]
[MSG:INFO: websocket auto report interval set to 300 ms]
ok
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
[GC:G0 G54 G17 G21 G90 G94 M5 M9 T0 F0 S0]
[MSG:ERR: Channel device rejected config]
[MSG:ERR: Channel device rejected config]
[MSG:ERR: Channel device rejected config]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:133,100,10>
Grbl 3.9 [FluidNC v3.9.1 (wifi) '$' for help]
$Report/Interval=300
[MSG:INFO: Check door]
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|WCO:0.000,0.000,0.000>
<Alarm|MPos:0.000,300.000,90.000|FS:0,0|Ov:100,100,90>
[MSG:ERR: Channel device rejected config]
[MSG:ERR: Channel device rejected config]
[MSG:ERR: Channel device rejected config]
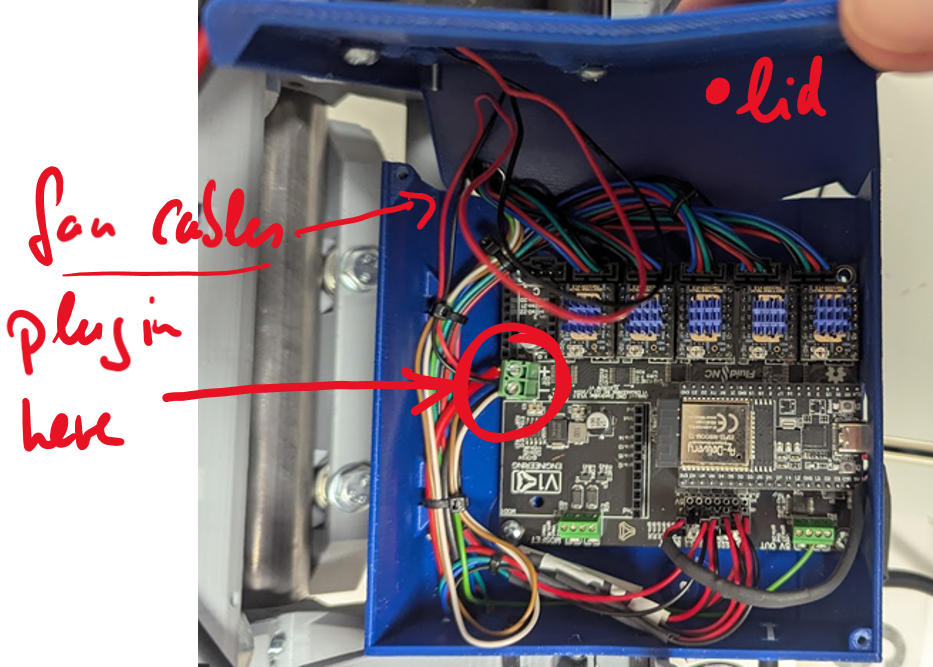
and after I restarted, jogged around, executed 3 files with no spindle, all stable. the only thing I changed, I turned the fan from the jackpotcase off…