Just keep hanging out, helping anyone you can. That makes my computer time more CAD focused and less support focused. It is an amazing thing to see an email with an issue and click through to find several people jumped in and already solved the problem. I love it!
When I have something building it and finding issues is the next step!
3 Likes
I recently did a slight upgrade on this setup
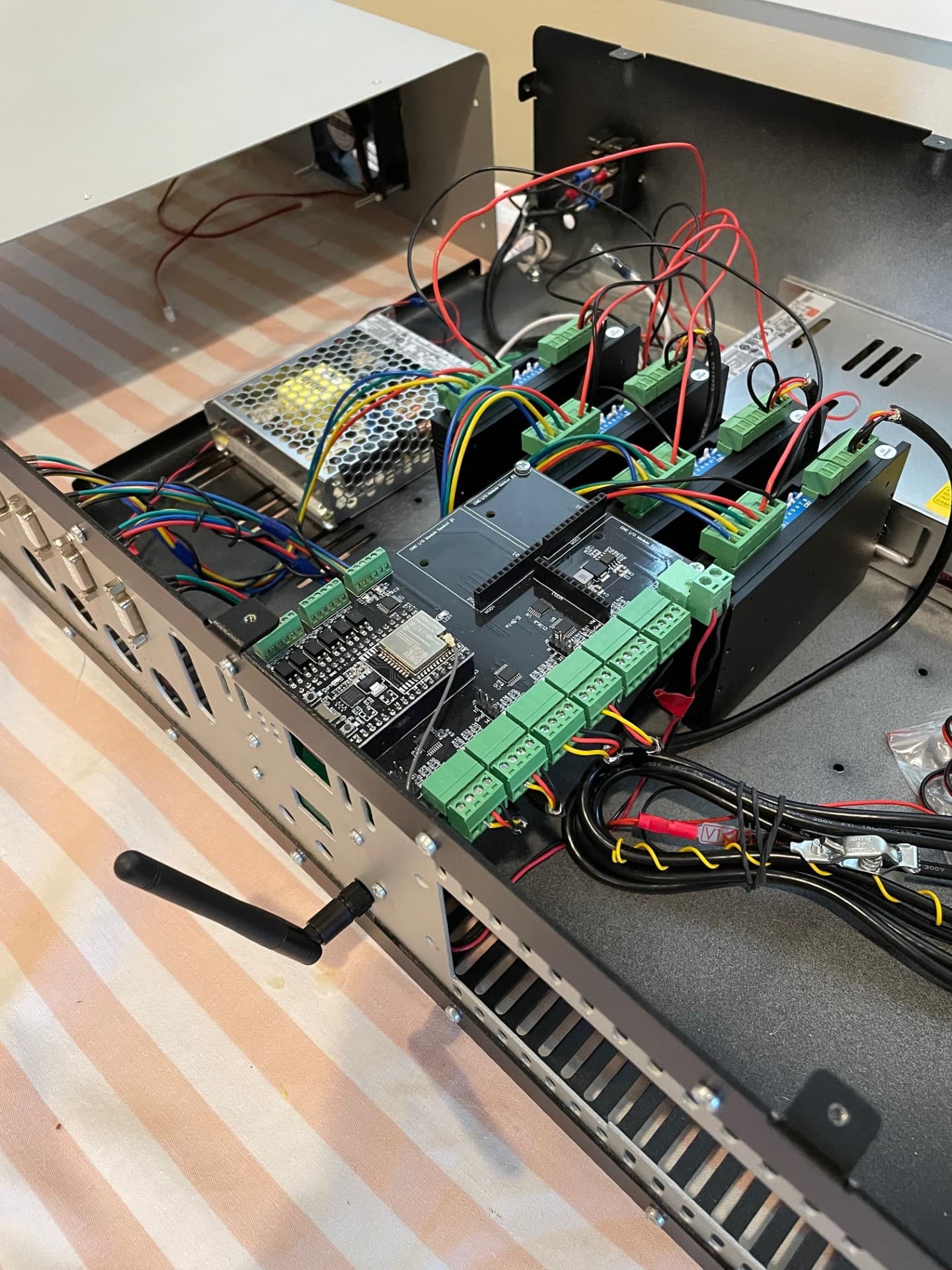
- Used an esp32 with external antenna. Much needed because this is all in a big enclosed metal case.
- Used 3 conductor shielded wires for the motor control signals. Not strictly required, but it certainly makes the wire management that much cleaner.
If you ever buy a esp32 and need to start from scratch in terms of flashing it, I hold the reset button until it connects. It depends on the board as to whether you need to do that or not, but I was sitting there perplexed until I remembered this.
Also, in my case, I had to use 115200 baud rate, so editing the various .bat files where baud rate is set explicitly.
Then, I did erase, install-wf, install-fs
And up it came.
I did a long wire for surface touch tool thing, but I’m not using it yet. I am also not using homing switches, as the original machine did not have those either. I might add those.
1 Like
Hmmm. That usually doesn’t work. You sometimes need to hold the boot button while it powers on, but the reset should disable the mcu completely.
I thought I might get that bassackwards.
It’s the ‘boot’ button then. I guess that makes more sense.
I really like the performance of the thing with an antenna. It’s much faster and more responsive than it was with the pcb antenna.
2 Likes
Hi William!
Can you share the config.yaml file where you define the “dumb” steppers?
I’m a newbie to Jackpot/FluidNC and not sure I grasp how the “dum” distinction is being applied in this domain.
Thanks in advance for sharing the configuration and if possible what has been your experience using external drivers.
close older topics to help with spambots, and faster new user questions.