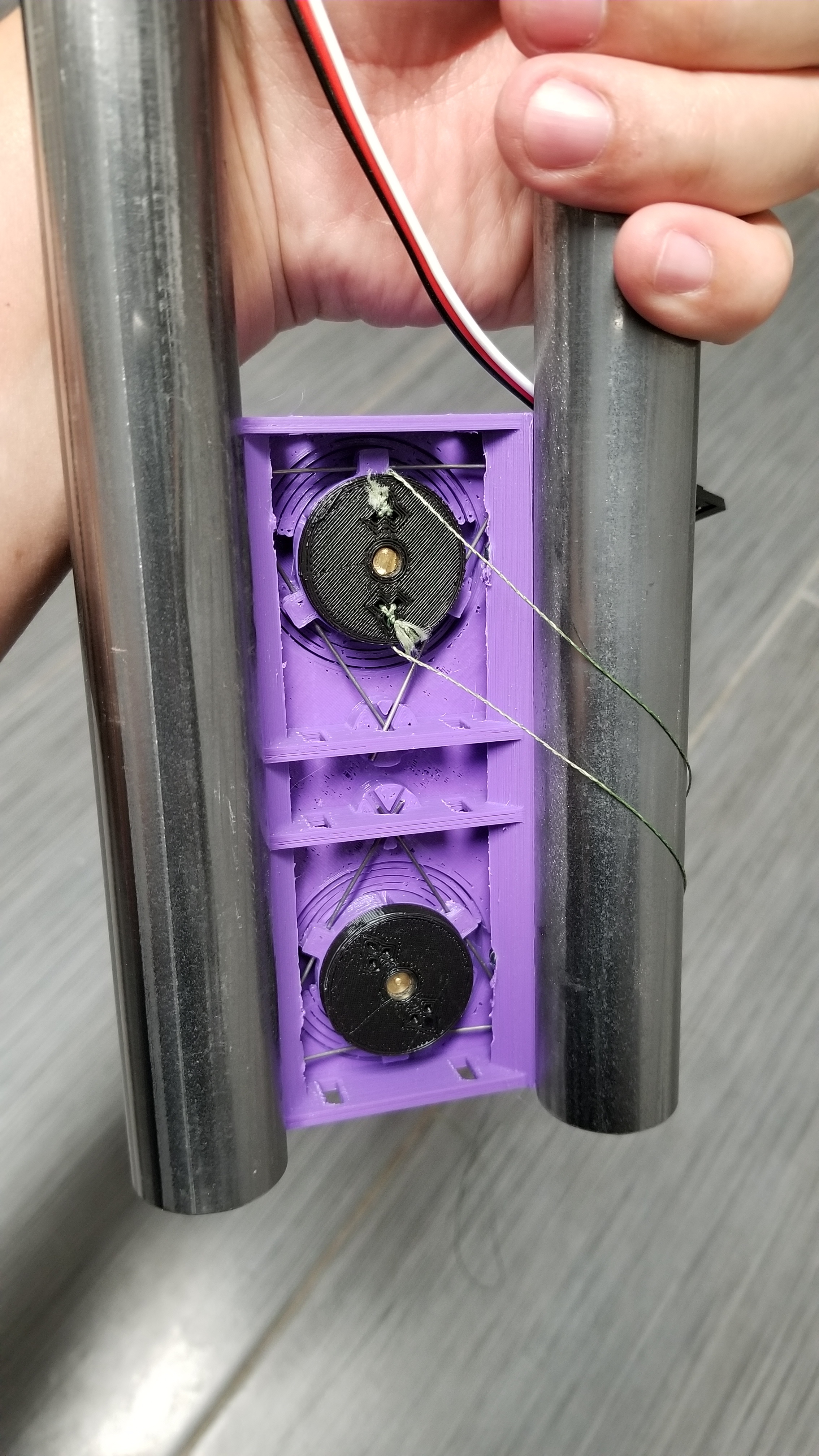
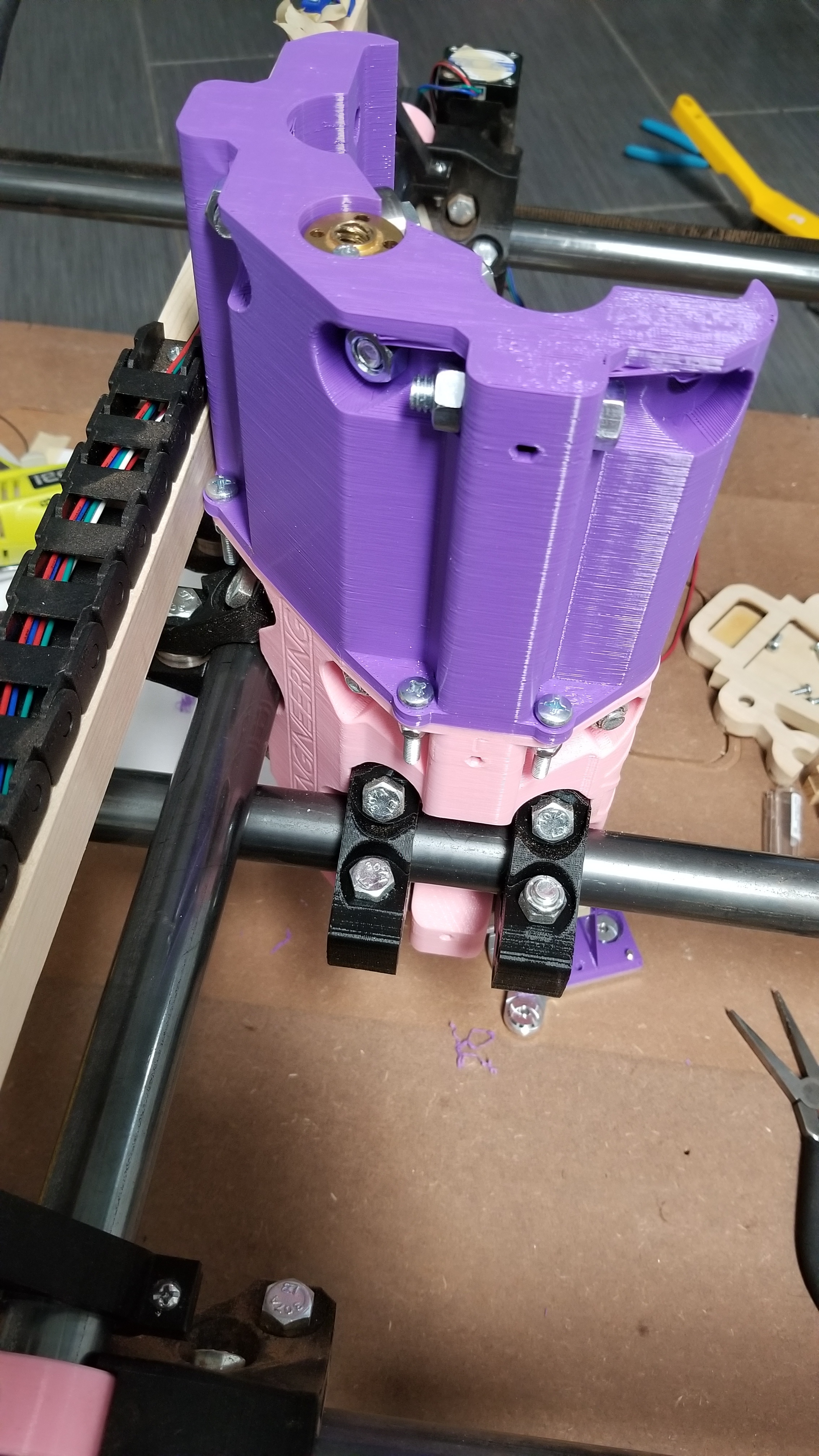
Here’s an update: I’ve got it working, but there are some things I need to fix.
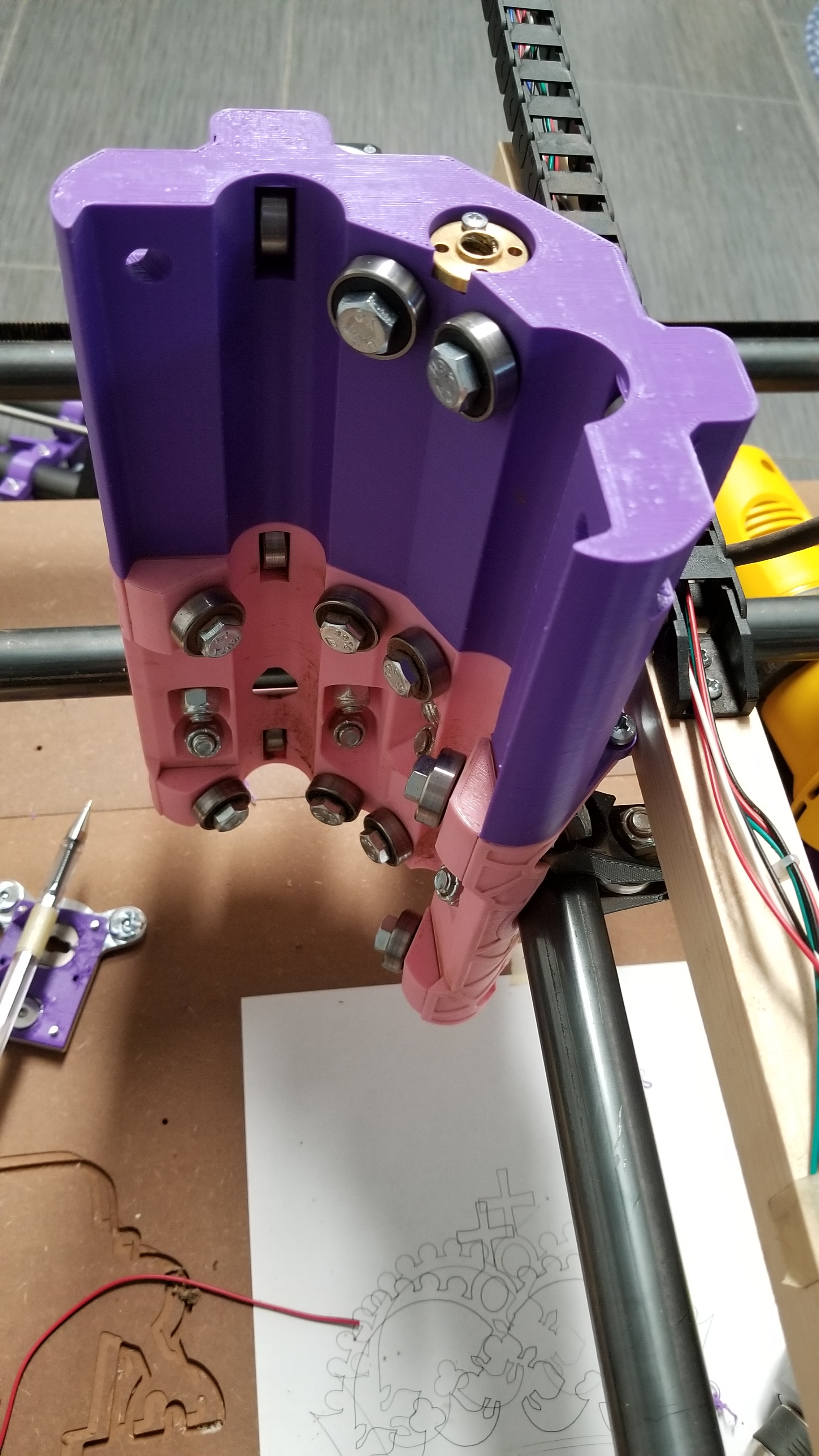
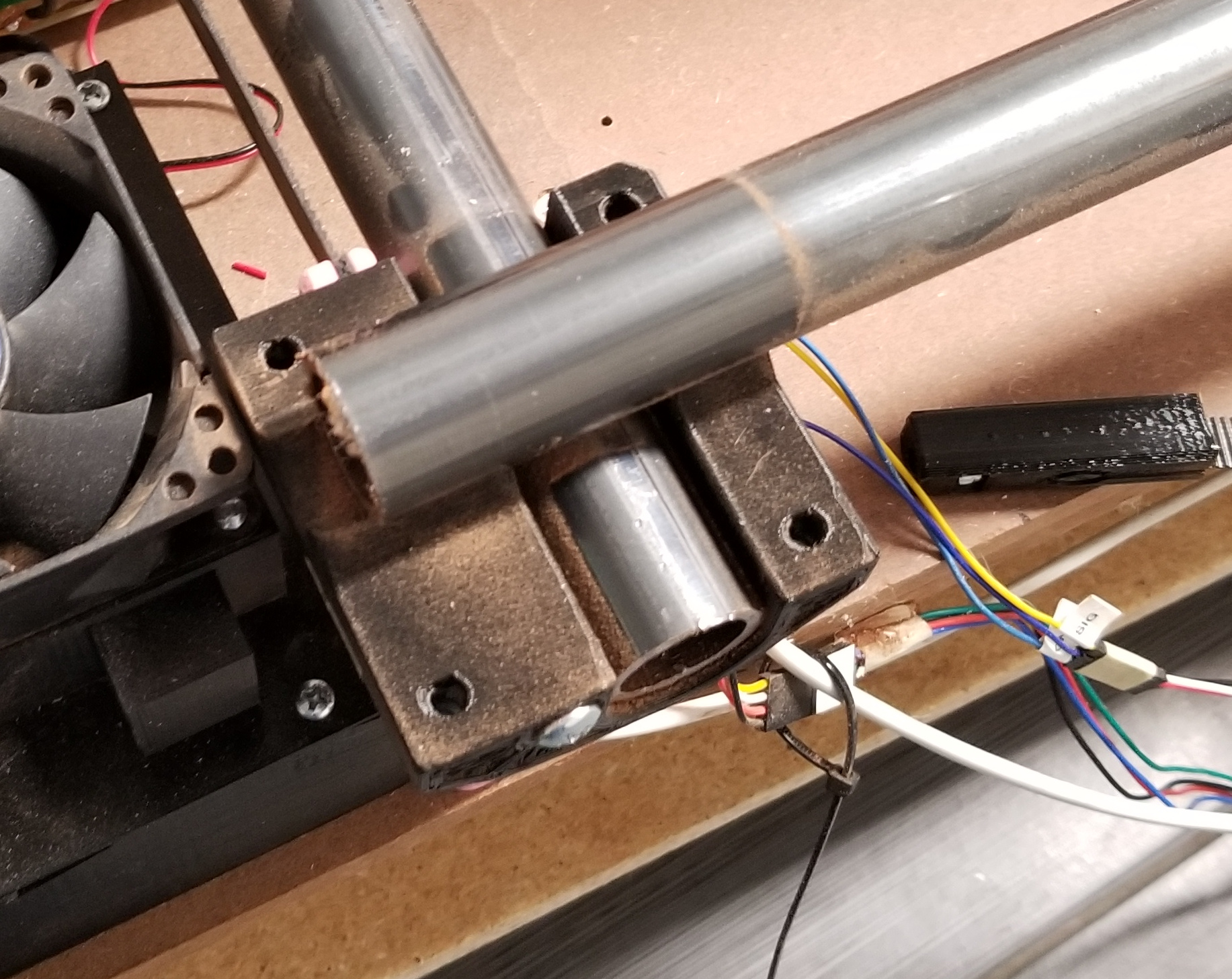
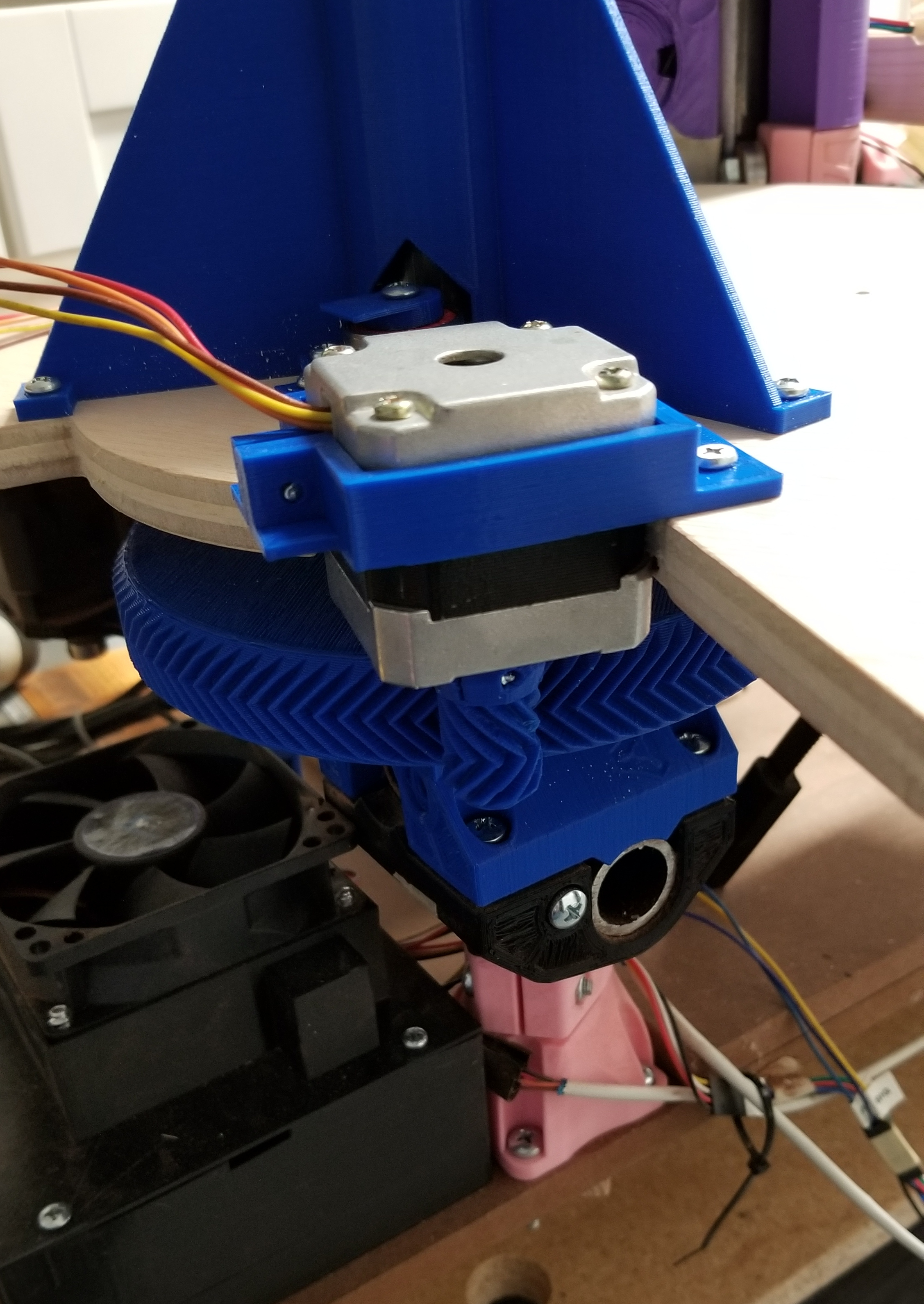
One, the 5mm rods are held in the pulleys (black circles above) just with friction, and it doesn’t hold very well. It needs glue. It slips slightly (axially) and loses its grip, and if it slips in rotation then that’s bad news.
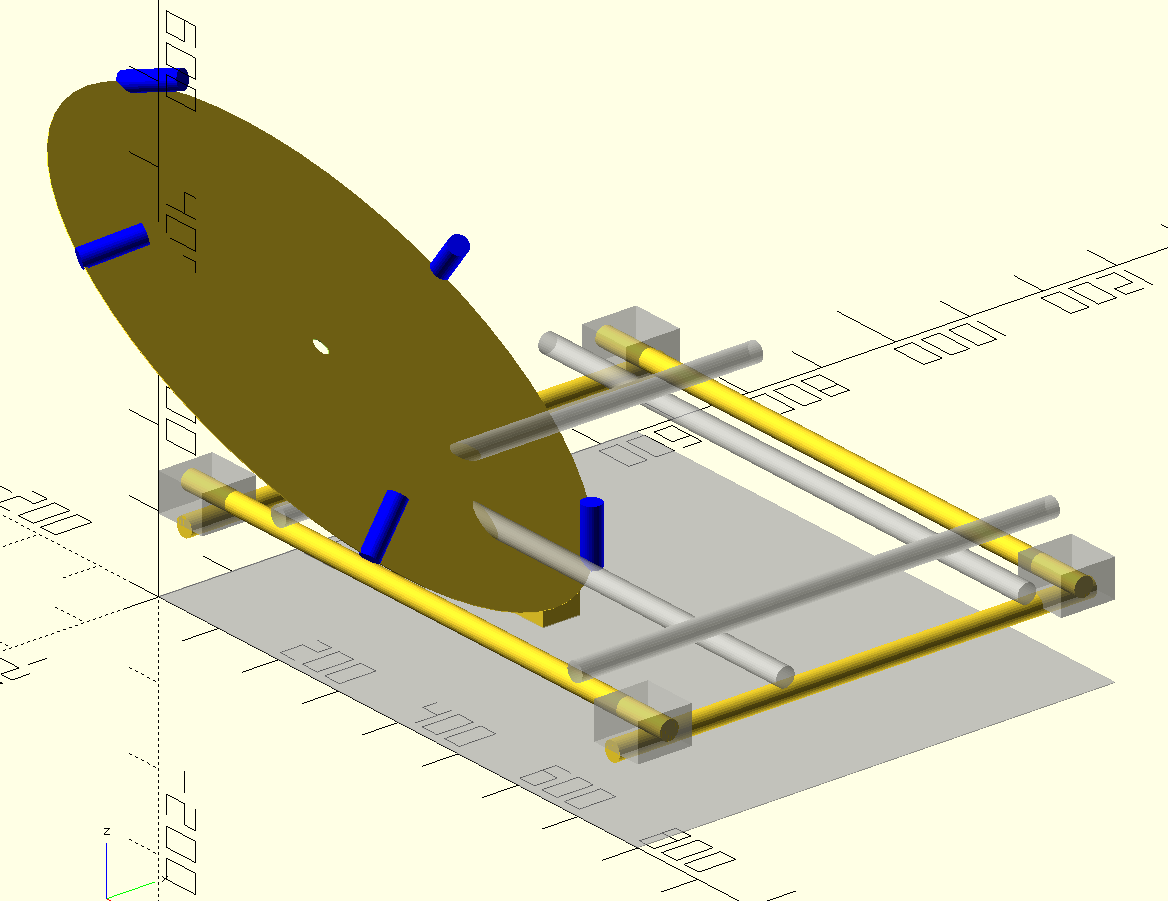
Also the protrusion of the rod collides a bit with the DW660 mount. I’ve made a plate that matches the Burly universal tool plate, and that is fine, but I need to either adjust the mount to make it slighly farther away (which would be universal), or carve a little pocket into the DW660 mount.
Also, while the springs are reasonably stiff, there is no preload, so there is a tradeoff between the axial grabbing motion and the amount of force that it will hold with. This will also change when the PLA flexure creeps.
So without any preload, the force (vertical axis) vs. displacement (horizontal axis) looks like this:
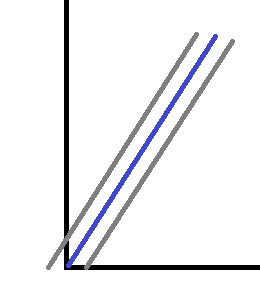
where purple is the ideal relationship but depending where the flexure has crept, it could be the grey lines. This means variable tension in the locked position and perhaps more importantly, variable position in the unlocked position, which in the worst case could fail.
With preload and a hard stop in one direction, the relationship looks more like this:
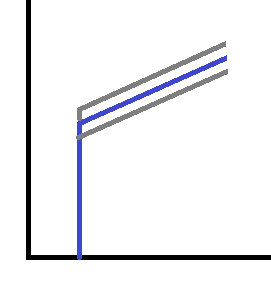
This can still have some variability in the tension but in the unlocked position it will have a consistent axial position and less axial deflection from the unlocked position is necessary to get a good strong hold. Space is tight and not much axial motion is available, so I’m pretty sure preload is going to be important.
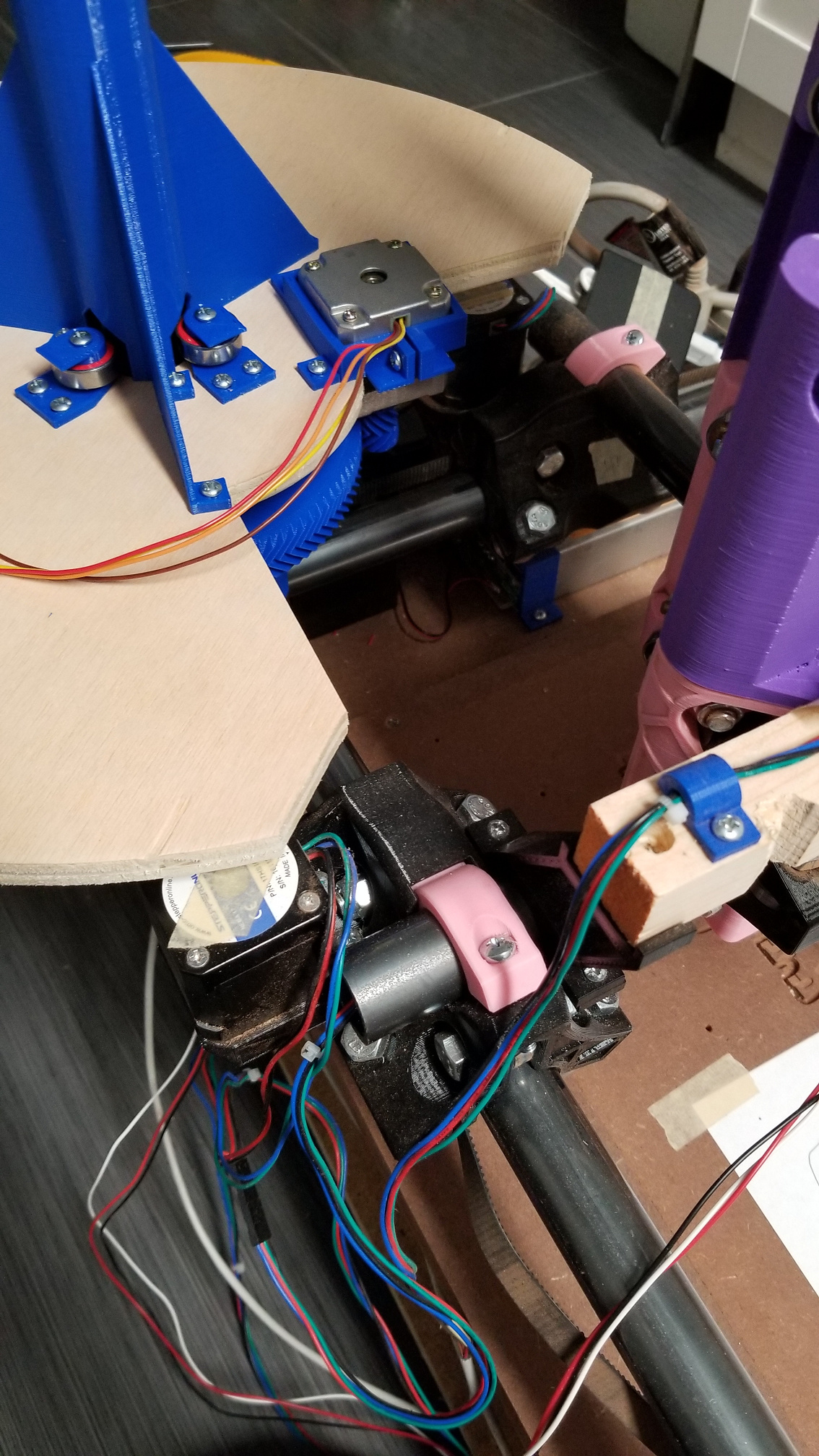
The other problem I have is how and where to park the tools. My previous tool changer had a huge Z axis which allowed the gantry rails to clear the tops of the parked tools. If the gantry rails can’t clear the tops of the parked tools, it really limits the options.
Routers could be swapped by hand and it’s still easier than fussing with bits and resetting Z and all that, but there is a big step between an easier manual change and an automatic change.
If anyone has brilliant ideas for parking tools, I’m taking suggestions.





 I’ll live with it.
I’ll live with it.





")