Continuing the discussion from Scara Coffee Table:
Hello Mr. Carsten, I took the liberty of copying your excellent project.
I thank this Forum where you can waste hours reading fascinating people and subjects.
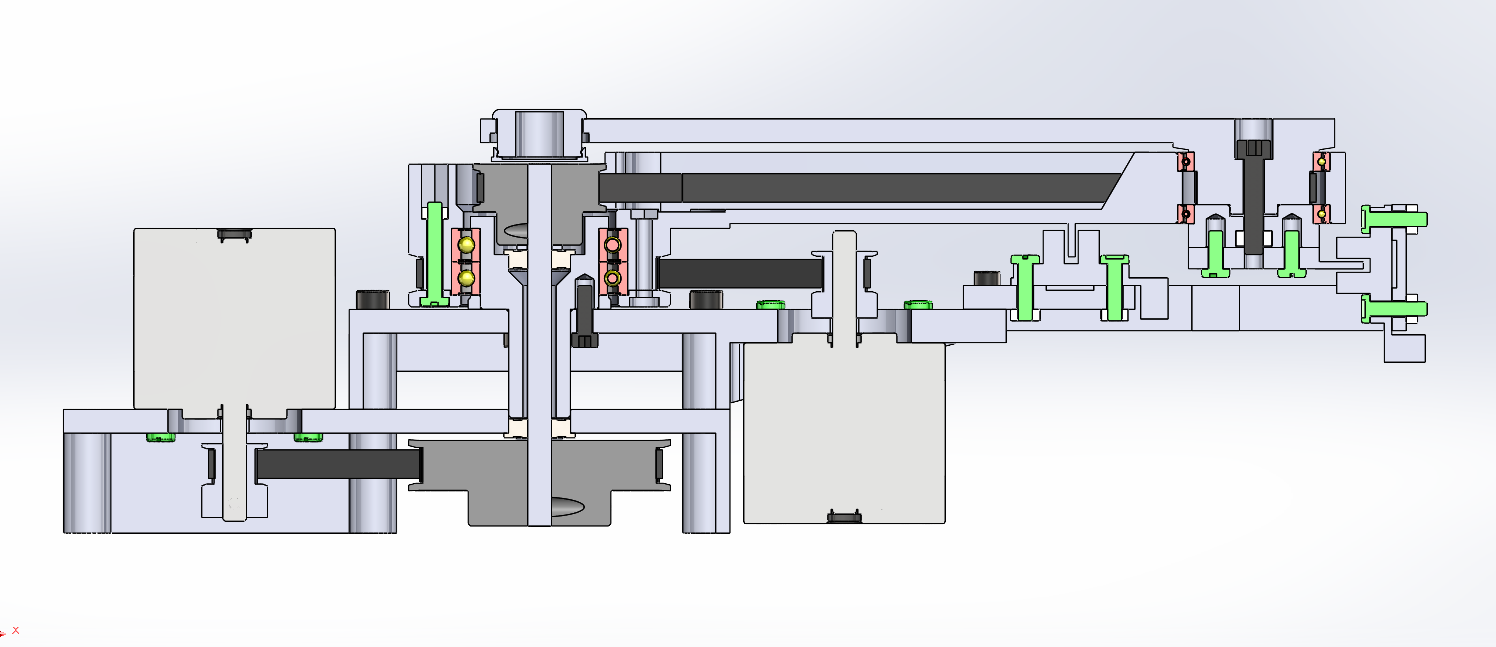
I have completed the easiest part for me which is the 3d design.
The software and development part will be harder.
I don’t know Klipper but there are good tutorials on Youtube.
I bought an SKR mini E3 V2 board and I have a Raspberrypi 2.
I started looking at your configuration files: in printer.cfg at the line [mcu pi] serial: /tmp/klipper_host_mcu what does this file contain?
Thank you