There are some steps you can take while you wait for your DRV8825 drivers to arrive:
- Put your Ramps and your Arduino Mega board together.
- Upload the firmware to your board. I’m going to assume you are going to do dual endstop wiring. This does not mean you have to have endstops. It just means that each motor is individually wired to a stepper driver. To install the firmware:
- Go here and download V1CNC_Ramps_Dual-2.0.7.2-src.zip file and UnZIP it to a directory. After UnZIPing, you should see another zip file and “firmware.hex.” It is the hex file you need.
- Go to this topic and follow the instructions. Note the location and name of the HEX file has moved since I wrote those directions, so firmware.hex is the file you need.
- If you have a display, install the display. I’m assuming that if you will have a display, it will be a RepRap display like this one. That is the kind of display that is configured in the firmware. If you need help plugging in your display, let me know.
- At this point, you can test that the firmware is installed. If you have a display, you should see the menu listed when you power the board from the USB. You may have to adjust the contrast using the potentiometer on the display to see the text. If you don’t have a display, you can use Repetier-Hoist to talk to your board. There are instructions for setting up Repetier-Host for the MPCNC here.
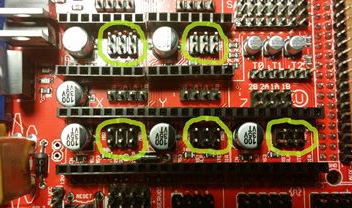
- With the board completely unpowered, install your jumpers for your stepper driver. For each stepper driver, you want a jumper for all three (MS1, MS2, MS3) positions. You want jumpers on all the pins circles here:
- Add 12V power to the board. Note that the motors and the board each have their own power input. Usually for the MPCNC, as single 12V power supply is used and the powered is jumpered between the two connections. On this V1 webpage is a picture of the powered jumpered on the connector.
- Research how to set the vref voltage for the DRV8825. There are lots of YouTube videos on this subject, plus there are some web pages. All the ones I’m familiar with are in English, but it is possible you can find one in your native language.
{kind=link}
AFTER YOU GET YOUR DRV8825 DRIVERS
- With the power disconnected, install the DRV8825 drivers. Be very careful that you install them the right way. The potentiometer that is used to adjust the voltage is on the opposite end of the stepper board from the A4988, so be sure any reference photo you use is for the DRV8825. Here is one reference image. I would wait to install the heat sinks.
- Plug in the stepper motors. for the LowRider, the second Y motor is connected to the Extruder 0 pins. The second Z motor is connected to Extruder 1 pins.
- Adjust the vref voltage. The suggested starting voltage is 0.7V. I’m guessing most people leave the voltage at 0.7V, but you can adjust it up in increments of 0.05 if you feel you need more torque. Higher vref voltages will run the stepper drivers hotter, so be careful.
- Install the heat sinks on your stepper drivers.
- Test your system by moving the axes. You can use the display to move, or you can move using the interface on the manual tab of Repetier-Hoist. If moving using the display, avoid any homing commands. Use Motion/Move Axis/Move X Axis to move the X Axis. If a motor moves the wrong way, you can flip any plug at any connection for that motor.
{kind=link}
OPTIONAL
If you plan to transition to the TB6600 drivers, then you will need to learn how to compile and upload the firmware. You don’t need to at this point, but if you want to, here is a page describing how it is done. Also if you plan to transition to the TB6600, you can start by just doing the single X motor and leaving the other four to use the DRV8825 drivers.