Received the printed parts:
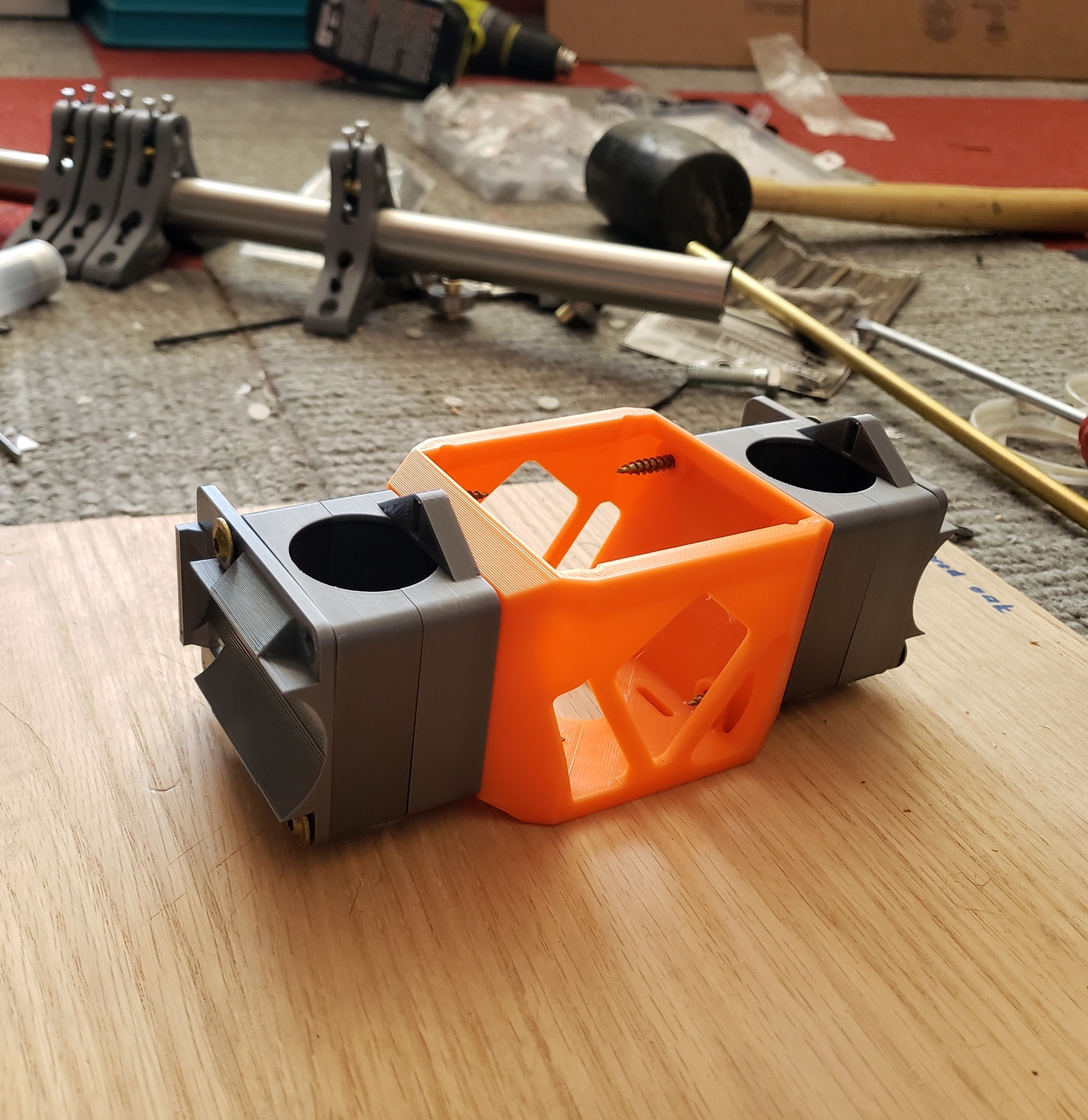
Unfortunately, the incorrect configuration got printed, so I will have to wait on some new clamps. But the upside is that the middle span doesn’t need to be swapped out, so the printing effort is low. Score one for modularity!
One thing to report is that the center span is super stiff. I think it might take some engineering to get the overall assembly to be equally stiff, but it might not actually matter. Once the first model is together, I’ll see if there’s any appreciable flex.
I also need to buy some hardware, I forgot to make a purchase on some long M4 (or SAE #8) bolts. So it’ll be another week before this part is ready for a test fit.