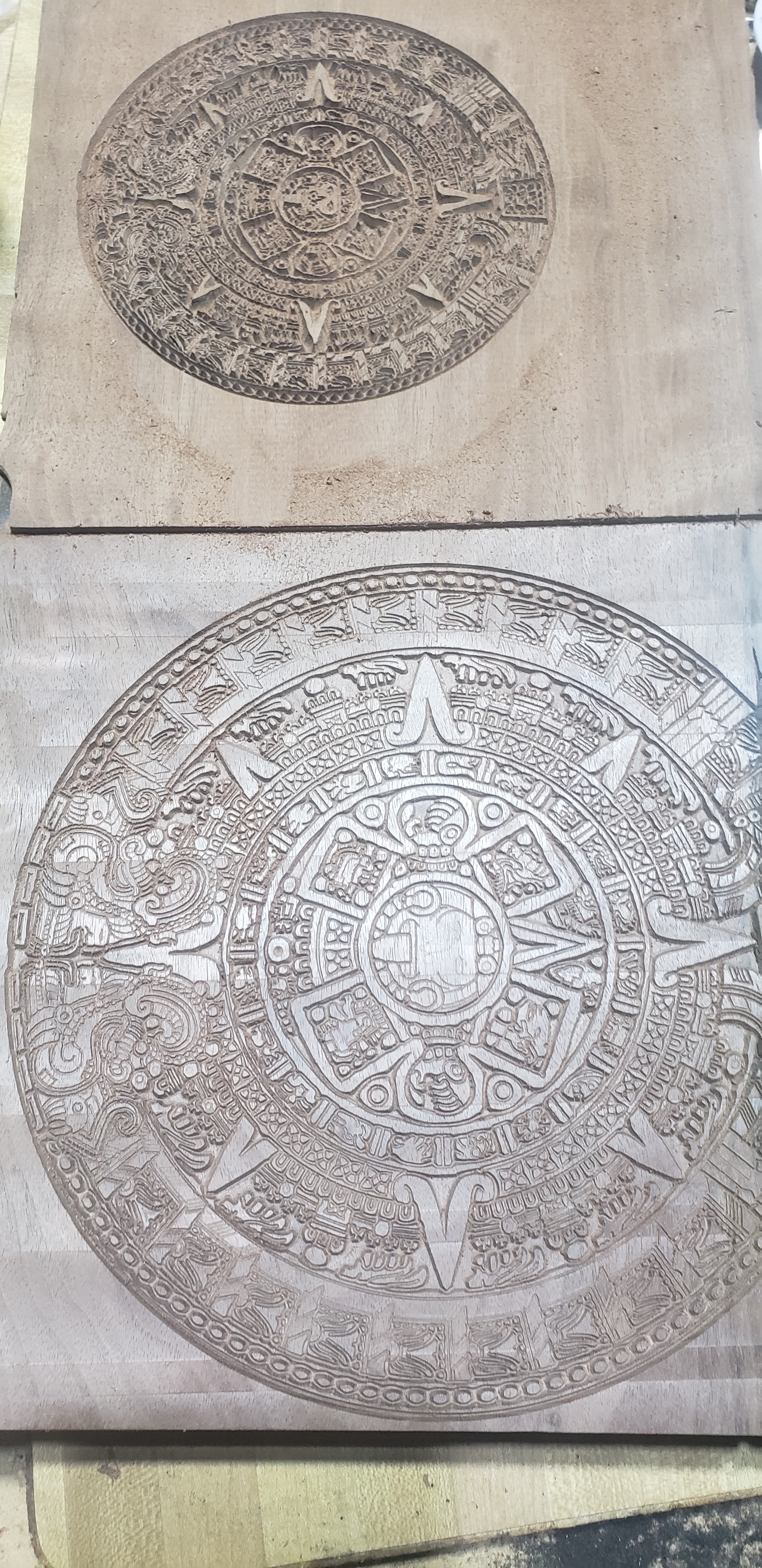
6x6 Aztec calendar V bit. Vectors were meant for half laser, half router. This was all done with the router. Had to restrict z speed to 5mm/s, ended up dropping down to about 70 percent feed rate due to my motors getting warm enough I didn’t want to hold my hand on then. Ordered some heat sinks to throw on the Z motors. And some 10 degree V bits instead of the 45 used here. Didnt have time to flatten board, and verify z height throughout circle, there are some spots the bit definitely got too deep.

6 Likes
Nice work. By the way, feed rate does not have much if any effect on motor heat. The current is the same even if they are holding still.
Fans are not a bad idea. The motors themselves can usually tolerate very high temperatures but the plastic they attach to can soften, which of course is very bad.
Great work!
An easier fix is to lower the stepper current I would say in 5% steps or so.
Is there a way to do this from the repetier console? I broke my lcd (new one in order I sent last night), so I’ve been spoiled with ease of adjustment through drive strength.
By chance have you tested the limits of the mini rambo drivers themselves? I am not against forced air cooling to keep my travel speeds high, both on the drivers and the steppers. For cuts like this, just the retraction time @ 5mms vs 10 is HUGE in overall cut time.
Someone should make a z axis test to determine the speed at which step loss occurs, and then you could set the maz Z speed at some safe margin, like 50% or 75% of that speed. For LR2 I imagine you would test at each end and in the middle and set relative to the lowest speed.
It will be different for every build.
Previously we set the Z max to the CPU power of the Ramps spinning a allthread Z axis at 32nd stepping. 8.4mm/s MAX.
We had to switch to T8’s when I made the LowRider because it was just to slow and not string enough at those speeds with a allthread. With the background set, the next issue seems to be different builds. Either leaning, misalignment, lube, whatever. So on an 8bit processor 32nd stepping we still have a max speed of about 5.6x’s faster (8.4*5.6=47mm/s) MAX but we have very little torque at those speeds so I have it firmware limited to 30mm/s with a very low acceleration. I, to be on the safe side, rarely run at more than 15mm/s Z.
1 Like
Understand completely there Ryan. My build has NEVER settled without power, and I know it should. One side used to, but now it doesn’t either, but now knowing my build was powering around at 20mm/s with somewhat moderate problems, I would definitely like to get to 10-12 with some sort of consistency just for time if nothing else.
1 Like