problem: Ever Z jogged your bit into the table/stock?
fix: Enable Users to optionally override separate max jog distances for xy and z. Default is still 100, this change lets you override to whatever. Personally, I set max Z jog distance to 20mm.
Anyone confused by, like or dislike this proposed ESP3D UI?
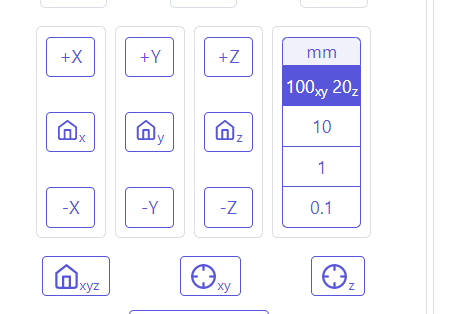
Currently, ESP3D jogging has hard coded distance options of 0.1, 1, 10, 100. Great for XY. However, it lets you Z jog 100mm, which isn’t useful.
Made small change proposing ESP3D enable smaller max z jog to be configured by Users, e.g. 20 or whatever you want.
Separate to making z axis jogging increments more useful. Arguably Marlin, after homing Z axis, would know where it is in real space and limit it’s motion to not exceed some configured range. Ideally Marlin would be smart enough to ignore commands that go out of some configured physical bounds.
Anyone know if range of motion limits are possible via gcode, or minor edits to Marlin configuration[_adv].h and compiling the firmware, or would deeper more invasive code change be needed? Cheers!