one other thing I noticed was whenever I have the Micro usb in the skr proI get printer not connected on the is display is that normal?
Hi Guys ,
I am back at it again I change the drive to Tmc 2130 my question is do I bend any pins on the driver itself ?
This is results I get when I do and M122
SENDING:M122
X Y Y2 Z Z2
Enabled false false false false false
Set current 900 900 900 900 900
RMS current 887 887 887 887 887
MAX current 1251 1251 1251 1251 1251
Run current 28/31 28/31 28/31 28/31 28/31
Hold current 22/31 22/31 22/31 22/31 22/31
CS actual 31/31 31/31 31/31 31/31 31/31
PWM scale 255 255 255 255 255
vsense 1=.18 1=.18 1=.18 1=.18 1=.18
stealthChop true true true true true
msteps 0 0 0 0 0
interp true true true true true
tstep 4294967295 4294967295 4294967295 4294967295 4294967295
PWM thresh.
[mm/s]
OT prewarn true true true true true
triggered
OTP false false false false false
off time 15 15 15 15 15
blank time 54 54 54 54 54
hysteresis
-end 12 12 12 12 12
-start 8 8 8 8 8
Stallguard thrs 0 0 0 0 0
uStep count 65535 65535 65535 65535 65535
DRVSTATUS X Y Y2 Z Z2
sg_result 1023 1023 1023 1023 1023
stallguard * * * * *
fsactive * * * * *
stst
olb * * * * *
ola * * * * *
s2gb * * * * *
s2ga * * * * *
otpw * * * * *
ot * * * * *
Driver registers:
X 0xFF:FF:FF:FF Bad response!
Y 0xFF:FF:FF:FF Bad response!
Y2 0xFF:FF:FF:FF Bad response!
Z 0xFF:FF:FF:FF Bad response!
Z2 0xFF:FF:FF:FF Bad response!
Testing X connection... Error: All HIGH
Testing Y connection... Error: All HIGH
Testing Y2 connection... Error: All HIGH
Testing Z connection... Error: All HIGH
Testing Z2 connection... Error: All HIGH
no stepper movement when I send out commands ![]()
This indicates there is no communication between the skr pro and any of the TMC drivers.
It does look like you are using dual endstop low rider firmware now though. Do you have a low rider or a primo?
The TMC2209 use UART to talk to the skr. The 2130 use SPI. The jumpers on the skr pro need to change to connect the spi instead of uart.
In he manual on pg 12/18, it shows which jumpers need to be installed for spi mode.
The MOTOR power input also needs to be connected:
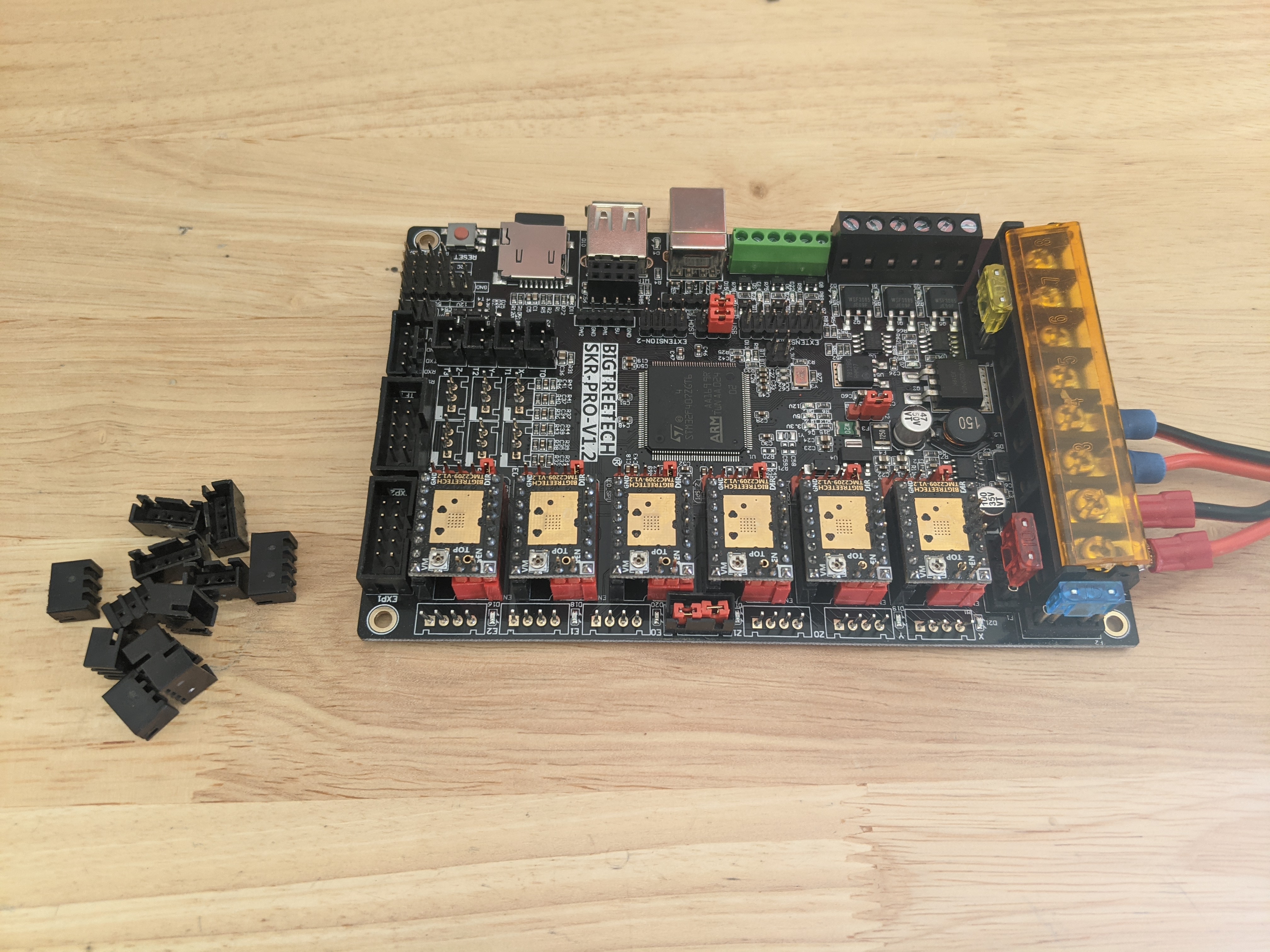
You can see how the 12V comes in to two places on the right.
The bent pin thing is to disconnect the sensorless homing pin. You don’t have to worry about that yet. The motors need to tall to the skr pro and actually move before you worry about endstops.
And just like that it works - you are the Greatest Of All Time ( GOAT) . I highly appreciate all the support and I am building a Low Rider V3 . Thanks
1 Like
SENDING:M122
X Y Y2 Z Z2
Enabled true true true true true
Set current 900 900 900 900 900
RMS current 887 887 887 887 887
MAX current 1251 1251 1251 1251 1251
Run current 28/31 28/31 28/31 28/31 28/31
Hold current 22/31 22/31 22/31 22/31 22/31
CS actual 22/31 22/31 22/31 22/31 22/31
PWM scale 0 0 0 0 0
vsense 1=.18 1=.18 1=.18 1=.18 1=.18
stealthChop false false false false false
msteps 16 16 16 16 16
interp true true true true true
tstep max max max max max
PWM thresh.
[mm/s]
OT prewarn false false false false false
triggered
OTP false false false false false
off time 3 3 3 3 3
blank time 24 24 24 24 24
hysteresis
-end -1 -1 -1 -1 -1
-start 1 1 1 1 1
Stallguard thrs 0 0 0 0 0
uStep count 376 328 712 8 8
DRVSTATUS X Y Y2 Z Z2
sg_result 76 77 80 82 75
stallguard * * * * *
fsactive
stst
olb
ola
s2gb
s2ga
otpw
ot
Driver registers:
X 0x81:16:00:48
Y 0x81:16:00:44
Y2 0x81:16:00:4E
Z 0x81:16:00:4A
Z2 0x81:16:00:49
Testing X connection... OK
Testing Y connection... OK
Testing Y2 connection... OK
Testing Z connection... OK
Testing Z2 connection... OK
1 Like
Guys what is the best bin file to add to my folder ?


Add them all. The screen will choose the right one.
Can Some give me an idea where to connect Z endstop on my setup - I do not see one on this picture .
Do I need to make any modification to the firmware in order to use this set up . Thanks
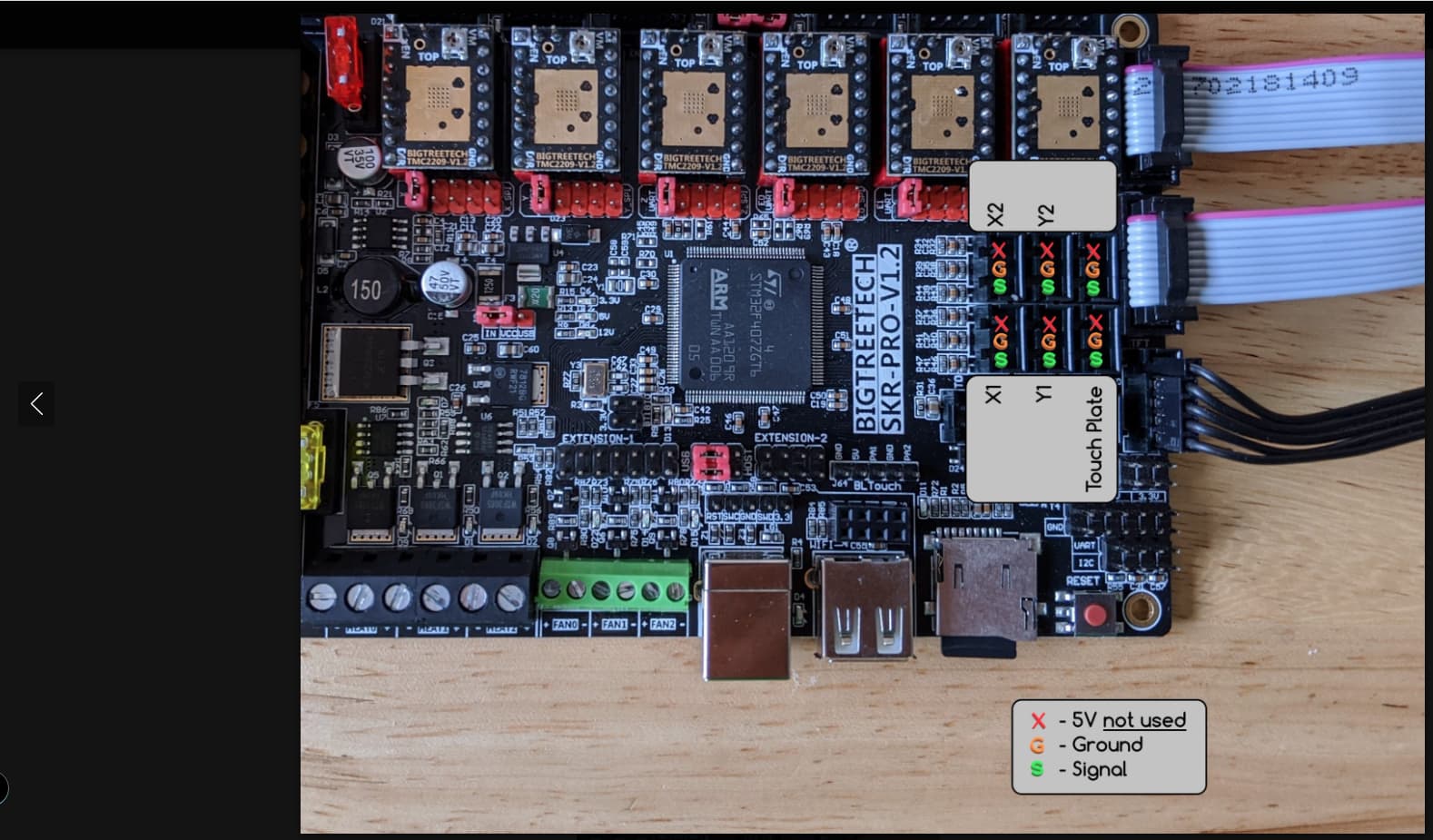
As-is, the firmware homes Z to the touch plate, and not to Z Max. (The unlabelled port in that picture.)
So yes, you will need to modify the firmware to home to Z max, similar to how the LR firmware does it. That also means that tou will need to define thr Z_Min stop as a probe pin, allowing the use of the G38.2 command to probe for Z=0.
I don’t have those edits handy right now.
Thanks for the heads up if someone can give me the edits - that will be awesome . Thanks